Approche à base d’apprentissage
Finalement, il Y a l’approche à base d’apprentissage. Bien que les deux approches mentionnées plus tôt fonctionnent bien pour séparer le sol de la végétation, l’approche à base d’apprentissage vient combler certaines lacunes. L’une d’elles est le problème de la météo. En effet, la température n’est pas toujours clémente et celle-ci affecte la performance du seuillage. Une autre lacune est que les deux premières approches ne sont pas suffisantes pour dissocier les récoltes des mauvaises herbes. Dans cette optique, il existe des techniques d’apprentissages pour aider à la segmentation ou à la classification. Certaines méthodes sont mentionnées par Hamuda et al. (2016) pour améliorer la segmentation des plantes du sol en temps nuageux ou ensoleillé. Par contre, ces techniques sont seulement utiles lorsque la prise d’images est faite sur une base régulière, donc à la merci de la météo. Pour la réalisation de ce projet, on a eu le luxe de choisir la journée pour faire le suivi des champs de bleuets. Puis il y a les méthodes de classification pour différentier les récoltes des mauvaises herbes.
Par exemple, Sa et al. (2016) et dos Santos Ferreira et al. (2017) utilisent des réseaux neuronaux convolutifs pour identifier les plantes. La proximité des images prises dans ces deux articles sont relativement proches des plantes. C’est pourquoi l’utilisation de réseaux neuronaux est justifié dans ces articles, car ceux-ci performent bien lorsqu’il y a beaucoup de nuances à extraire dans les caractéristiques de l’image. Pour des images aériennes prises à plus haute altitude, l’information la plus intéressante à utiliser est l’indice de végétation. Bien que celle-ci sert principalement à séparer la végétation du sol, elle pourrait être utilisée pour identifier une plante en particulier. Par exemple, il existe des systèmes qui utilisent les signatures acoustiques des navires pour identifier leurs types de plates-formes. Dans un même ordre d’idée, on peut utiliser les indices de végétations comme une signature pour classifier les plantes. Pour ces raisons, la technique des K-moyennes sera l’approche utilisée pour discerner les mauvaises herbes des bleuets
Planificateurs de vol et orthorectifieur
Pour arriver à nos buts, il faut pouvoir automatiser les vols de drone. Il existe plusieurs logiciels pour planifier ces types de vol. Lors de la recherche, trois approches ont été étudiées. La première approche a été l’utilisation de Tower, une application mobile développée par DroidPlanner. La planification des missions dans l’application se fait entièrement manuelle13 ment au niveau de l’interface. Il est possible d’exporter et d’importer les missions sous des formats plus digérables pour l’automatisation. En prenant les positions géographiques des quatres coins d’un champ de bleuets, on peut générer l’itinéraire du drone. Cependant, le logiciel a eu sa dernière mise à jour en 2017 et semble avoir été abandonné depuis. La deuxième approche a été d’explorer l’interface de programmation d’application dronekit. Cette IP A permet de développer des logiciels pour commander des drones en python ou en android. Bien que cela nous permet de faire une application spécifique à la problématique, le développement complet d’une application sort de la portée du projet. La troisième approche été l’utilisation de Mission Planner de Michael Oborne. Il permet de générer des intinéraires suivant des patrons de vol afin de couvrir les régions désirées. Le logiciel est stable et il est maintenu fréquemment par la communauté A rduPilot. Ensuite il faut trouver une solution pour orthorectifier ces images. Plusieurs logiciels sont décrits et comparés par Gross (2015). Par contre, aucun des logiciels proposés dans ce document n’a de licence assez permissive pour construire un outil accessible. OpenDroneMap est un projet qui propose plusieurs modules différents pour produire des orthoimages. La principale différence entre les modules est la façon dont on interagit avec le système. Par exemple:
• WebODM offre une interface graphique permettant de visualiser les résultats directement dans un navigateur web;
• DM est une interface en ligne de commande;
• PyODM est un kit de développement en python.
Indices de végétations
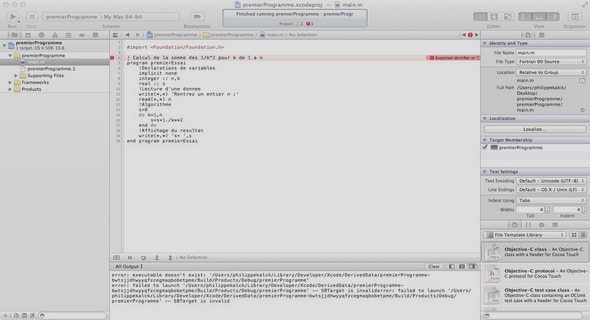
Les images peuvent être produites par différentes lentilles ou être acquises à différentes saisons de l’année. C’est pourquoi il est nécessaire de tester différents indices de végétations afin d’avoir les meilleurs résultats. Ainsi pour faciliter l’utilisation de différents indices de végétation, un script en python a été développé. Quatre indices de végétations sont implémentées dans le script: ExG, ExR, ExR et le NDVI. L’implémentation du script va se traduire en une interface en ligne de commande. Cette décision nous permet d’expérimenter facilement les différents indices, mais aussi de permettre le traitement d’un grand volume d’images. L’interface va accepter un indice en option avec une liste de un ou plusieurs noms de fichier d’images. Pour chaque image traitée, il y aura une version de celle-ci sauvegardée avec l’indice de concaténer dans son nom de fichier. Le nom du programme est «vegutil», un mot-valise des mots anglais vegetation et util. Le code source 3 est un extrait de vegutil qui définit une lambda pour chaque indice de végétation qui va opérer sur les composantes de couleurs. Une de ces lambdas définies est ensuite passé à la fontion _converter _ template pour appliquer l’indice de végétations sur tous les pixels.
Cette structure modulaire du code permet l’ajouts de nouveaux indices de végétation sans trop de friction. Prenons par exemple une des images acquises lors de ce projet illustrée à la figure 11 pour démontrer le fonctionnement du programme. Avec la commande vegutil -i exg exemple. jpg, l’image est ouvert en un tableau numpy et on passe le tableau en paramètre à la méthode apply along_axis. Cette méthode permet de parcourir un tableau selon un axe choisi et d’y appliquer une fonction de transformation. Dans ce cas-ci, la fonction de transformation est déclarée selon les lambdas au code source 3 et l’axe choisi est la profondeur de l’image pour que la méthode apply along_axis puisse fournir la valeur des couleurs aux lambdas. La figure 12 est une visualisation d’une des itérations de apply along_axis . Donc on peut voir que le résultat de ce processus va nous retourner une image en nuance de gris où les pixels sombres représentent le sol et les pixels claires représentent la végétation. Pour les images multispectraux, la structure du code est similaire avec quelques différences comme les indices en entrée et la préparation des données. En fait , ces différences ont amenés à faire une version de vegutil qui ne traite que les images multispectraux. Nommées vegutilmi, ce programme doit avoir en entrée chaque bande requise sous forme d’image pour évaluer l’indice. Un exemple d’utilisation ressemblerait à ceci: vegutil-mi –indice exg –order red green blue –images red. tif green. tif blue. tif. La suite est similaire à vegutil où les bandes de couleurs nécessaire sont fournies par plusieurs images au lieu d’une seul.
Conclusion
L’objectif de ce mémoire a été d’explorer des solutions pour mieux outiller les agriculteurs du bleuet nain. Ces outils assistent l’agriculteur pour mieux le guider dans son combat contre la comptonie voyageuse et le kalmia à feuille étroite. Ce processus a passé par l’acquisition des images brutes à l’aide de drone jusqu’à l’utilisation d’application web de cartographie. L’utilisation de cette technologie va permettre aux agriculteurs de faire un contrôle plus ciblé des plants indésirables. Ainsi, les cultures conventionnelles et les cultures biologiques peuvent être à la fois plus rentables et plus écologiques. En effet, cette solution réduit l’utilisation d’herbicide et les coûts de main-d’oeuvre pour le désherbage manuel. Premièrement, ce parcours a commencé par la sélection du moment le plus approprié dans l’année pour capturer les images des· champs de bleuets. Étant donné que la comptonie et le kalmia sont les premiers et les derniers plants à être relativement plus vert durant la saison végétative, le printemps et l’automne sont les moments où la capture d’image s’est réalisée. Ensuite, pour l’acquisition d’image, plusieurs logiciels ont été testés pour planifier les vols du drone et prendre en compte plusieurs paramètres afin d’optimiser la prise d ‘image. Deuxièmement, il faut prendre ces collections d’images et les transformer en une orthophotographie afin d ‘avoir une vue d’ensemble sur le champ. Ce procédé a pu être possible avec le logiciel OpenDroneMap qui se spécialise dans l’analyse d’images prises par des drones. Troisièmement, on a développé un programme pour analyser et pour transformer ces images afin d’amplifier le signal de végétation.
L’intensification de ce signal s’est réalisé par l’utilisation de plusieurs indices de végétations dont l’ exg, l’exr, l’exgr et le ndvi. Ensuite une variété de méthode de segmentation s’est intégrée au programme afin de pouvoir séparer la végétation du sol. L’implémentation de plusieurs de ces méthodes viennent des librairies scikit-image et scikit-learn. La méthode Yen, Otsu et K mean ont été intégré afin de pouvoir comparer leurs performances. Finalement, on utilise les métadonnées géographiques des images pour faire le pont entre les résultats de segmentation vers des applications concrètes. Par exemple, des cartes de chaleur sur 2 médiums différents ont été présentées comme application possible avec ces types de données. De plus, on laisse la porte ouverte pour d’autres applications en y exposant les données brutes de localisation dans un format digestible pour des systèmes informatiques. Une grande part de la recherche s’est attardée sur la question de quelles méthodes est la plus efficace pour séparer le sol de la végétation. C’est pourquoi on a mesuré la performance des techniques de segmentation en variant les indices de végétation. D’une part, on a remarqué que l’indice de végétation altère légèrement les résultats des méthodes de seuillage ainsi ne favorisant aucune technique en particulier. D’autre part, la méthode Yen a démontré plus de précision que les autres techniques. Alors pour confirmer ce résultat, le nombre d’échantillons de test a été augmenté et les résultats ont montré un classement similaire aux autres tests. Cependant l’exploration sur la variation du nombre de classe de la méthode des K-moyennes a démontré des résultats supérieurs à la méthode Yen.
Sommaire |