Stabilisation d’un double pendule inversé par
microprocesseur
Quelques détails technoloGiques sur la « synchronisation » du circuit
Le but (lu cLrcuit logique est de maintenir Ë 1 ou Ë2 à zéro selon le sens choisi par l’DC, et cela pendant une durée proportionnelle à Qn’ à chaque pas de récurrence du programme qui doit durer exactement Il = 5ms. SchématiqClement, l’HC réalise l’acquisition des mesures, calcule la durée Qn cl ‘alimentation du mot eur- ainsi que le sens de rotation de clui-ci. (La durée de t.ou t ceci doit évidemment être .i nf’é r i.eur-e à h.). Puis il attend Le signal logique P1C4 venant du circuit logique, qui l’autorise à rendre effective la commande qui v i ent d’être calculée. Le rôle de P1C4 est alors de syncbroniser l’envoi de la commande et le début du comptage au compteur 13393. Le choix de Ë1 ou bien de Ë2 qui détermine le sens de rotation du moteur est dicté par l’HC, qui envoie sur la broche appelée IS du LS193 (IS pour Inversion-signe) un 1 si Ë2 est choisi, c’est-à-dire le sens (+) du moteur, et un 0 si Ë1 est choisi. (Voir Fig. 12a). En effet, le compteur IB393 compte de 0 à 12S, puis se remet à o. Son bit de poids fort (MSB) met alors un 1 sur N1-S. Ceci assure aussi que la commande une durée exacte de h , car, tant que A < 128 les signaux Ë1 et Ë2 ne changent pas d’état. Le comparateur IBS5 fournit le signal Qn = A qui désactive la commande. Par exemple, le sens (-) a été choisi, c’est-à-dire Ë1 = 0 ; alors, (voir Fig. 5.b) quand A = Qn’ devient égal à 1 jusqu’à la fin du comptage (A=12S) (où il peLt égal à 0 ou rester 4gal à 1 selon que le sens dicté pat l’De est Ë1 ov Ë2 • Sur la Fig.5b, nous avons choisi le sens (+) pour le pas suivant). Le compteur à char g emerrt parallèle IB193 charge dans le comparateur et permet de choisir le s ens de rotation (par IS). Le nombre f~n n’est chargé que lorsque le boîtier a reçu le signal load envoyé par l’HC. I~ais l’Ue, attend le signal P1C4 (haut) sortie de la bascule B2 pour envoyer le Load , Le bit P1 C4 est égal à 1 Qn=A.
L’impulsion load (=0) charge à la fois le nombre
Qn+1 et le sens 13 pour le prochain pas. Mais ce sens ne sera effectif que lorsqu’il .’f aura un 1 sur N1-8, c’est-à-dire lorsque le compteur aura fini le compLage. Ainsi la commande (Qn et sens' » Is) est « proposée » par l ‘liC dès qu’il a fini les ca Leu Le et reçu l’autorisation par P1 C4, mais n’est r-endue effective qu’au début du comptage suivant. Cette synchronisation de l’envoi de la commande et du début du comptage pour la commande suivante assure que le nombre Qn atteint par le compteur est effectivement le nombre désiré par l ‘DC. De plus, la durée de la commande est exactement égale à h, 2.3. Les capteurs Les capteurs sont au nombre de d aux : un capteur d’angle et un capteur de position du chariot. Le capteur d’angle mesure l’angle que fait la barre du bas avec la perpendiculaire aux rails, et le capteur de p03ition mesure l’abscisse du chariot sur les rails par rapport à une origine fixée l’opérate’lr.
Le capteur d’angle
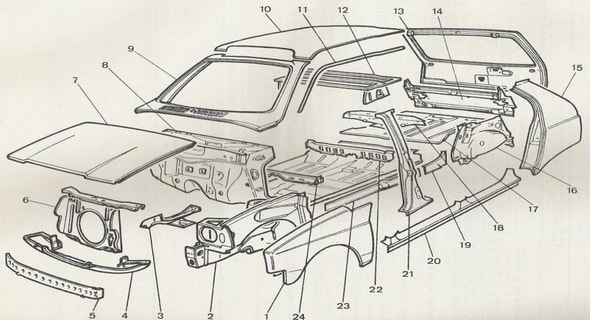
C’est un potentiomètre actionné par un engrenage solidaire d es mouv emerrt s de la barre inférieure. (voir photo n07). Le po t en t Lomèt r-e est alimenté en +12 V et -12 V. L’excursion de la barre est limitée entre +90 et _gO environ. N’utilisant que 4,5 Volts pour l’excursion maximale de gO, et avec un corrver-t ias eur- analogique/digital de 7 bits + signe (voir plus loin) on a les correspondances : 35 mV~-) 1 unité numérique H 0.07 degré (soit 1.2368 10-3 rd). • Quelques détails à pro pas du conveTtiss eUT analogique /digi tal. C’est un ADC 80 AC-12 (Burr Brown) 12 bits. Mais seuls les 7 bits les plus significatifs et le bit de signe ont été retenus. Initialement la taille 12 bits a été choisie pour être proche de la taille 16 bits avec laquelle l’angle sera codé dans les calculs. Mais il s’est avéré que les 4 derniers bits étaient entachés de bruit, et que finalement une aussi grande précision n’était pas nécessaire. – 1 ] 9 – Pour accep ter un e lIle:lure de l ‘ ang le, l ‘UC doit adr es s e! » au ee nve – ut sa e cun e impulsion {pc at t Iv e ] de demande de co rwersrc n, Envi r on 25 ce ptue t ar d l a conver s ion es t pr êt e. La demande de conver s i on s e tr ouv e au b it 2C’~ d ‘m por t d ‘ entré e/sortie d e l a carte- mi c ro . Pour é conomi s er l es ent ré es / so r t ie s , nous n ‘avons pas fait ent r er l e bit de « f i n d e conv er s i on » du eonv er cae eeur , ea rs nous avons fai t une bo uc Le d ‘attent e d ‘ environ une t rent ai ne d e cu cro-e ecc ndee , ce qu i ares t av6ré suffisant . 2 .3. 2 . Le ca pt eur de 00’!1t 10n. Un di sque di visé en ‘ 6 s ect eur s noirs et ré f Léchfaeant e surmont e l ‘arb r e du raot eor , et es t e xposé à d eux pbo to ddcdea (voi r Phot o nOe ). Ce l Lee- œL a ttaque nt un circuit de mi s e en f or me des signaux qui donnen -t à la sortie deux signaux OUT’ et OUT2 av ec des fro nt s ne t s soit en avance , s oit en r et ar d l ‘ un par rapport à l ‘aut r e (cf. s chlltn8. nO 6 pour l e ci r C’l i t da mis e er. f orme des signau x . _ Annexe A4 )
Chapi tre l : Description de la Mécanique du chariot |