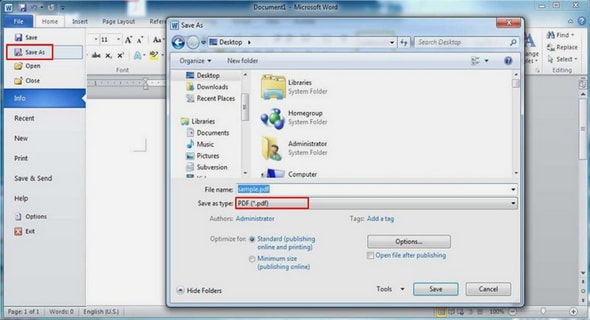
Topologies et générateurs des système éoliens
Plusieurs critères sont pris en compte dans la détermination de la topologie et du type de génératrice utilisé pour la production de l’énergie éolienne: comme le type par rapport à la vitesse, une éolienne à vitesse fixe ou variable, la puissance qui peut être une éolienne de petite taille ou de grande taille, ou l’éolienne connectée au réseau ou autonome [17]. En règle générale, il y a deux types de générateurs utilisés dans les éoliennes: asynchrones et synchrones.
Éoliennes utilisant les machines asynchrones :
Le développement dans le domaine de l’électronique de puissance a permis aux génératrices asynchrones de devenir l’un des choix préférés dans la production aérodynamique de l’énergie électrique; ce type de génératrice est moins cher, robuste et n’exige pas beaucoup de maintenance. Cependant, le principal inconvénient de ce type est la nécessité d’utiliser un dispositif de récupération de l’énergie réactive (des condensateurs).
Il existe plusieurs types de générateurs asynchrones utilisés dans les turbines éoliennes, mais dans la pratique on trouve généralement deux types de génératrices asynchrones qui sont les plus utilisées pour des raisons économiques et énergétiques: les génératrices à cage d’écureuil (SCIG) et les génératrices asynchrones à double alimentation (GADA) [18].
Générateur asynchrone à double alimentation (GADA)
Le principe de ce type est basé sur le contrôle de l’ écoulement de la puissance de glissement; la commande du convertisseur côté rotor nous permet de régler le couple électromagnétique du système et de récupérer une partie de la puissance du rotor afin de l’injecter au réseau [19]. D’autre part, le convertisseur côté réseau régule la liaison CC dans le but d’atteindre une tension de sortie avec une fréquence équivalente à celle du réseau [18].
Par rapport à d’autres types de générateurs, la GADA offre les avantages suivants:
./ La réduction du coût de l’ onduleur, car les convertisseurs sont dimensionnés juste pour une puissance comprise entre 25 à 30% de la puissance nominale de la machine [20];
./ La diminution de la puissance des convertisseurs statiques permettant la minimisation des composants de filtrage et de conversion;
./ La robustesse et une réponse stable aux perturbations externes.
L’un des inconvénients de la GADA est l’utilisation de bagues collectrices qui nécessitent un entretien périodique. [18].
Générateur asynchrone à cage d’écureuil (SCIG)
Ce dispositif est considéré comme le plus simple et le plus couramment utilisé, dans lequel le rotor de la SCIG est couplé mécaniquement à l’arbre de transmission de l’éolienne par l’intermédiaire d’un multiplicateur de vitesse, et où le stator est connecté directement au réseau . Le nombre de paires de pôles de la génératrice est fixe, elle doit donc fonctionner sur une plage de vitesse très limitée (glissement inférieur à 2%). La fréquence étant imposée par le réseau, si le glissement devient trop important les courants statoriques de la machine augmentent et peuvent devenir destructeurs, par conséquent pour assurer un fonctionnement stable du dispositif, la génératrice doit maintenir une vitesse de rotation proche du synchronisme (point g=O).
SCIG étant un générateur à vitesse fixe, pour un vent particulier la puissance active de sortie est également fixe . Ainsi, avec l’augmentation de la vitesse du vent, il en va de même pour la puissance de sortie et la puissance nominale est atteinte. La vitesse du vent à ce moment est appelée la vitesse nominale du vent. Au-delà de cette vitesse, le système de contrôle de l’angle de calage empêchera la puissance de sortie de dépasser la valeur nominale. En d’autres termes, lorsque la vitesse du vent est inférieure à la valeur nominale, la puissance capturée peut varier en fonction de la vitesse du vent; et lorsque la vitesse du vent est supérieure à la valeur nominale, le système limitera la puissance générée par le contrôle de l’angle de tangage (contrôle de la vitesse du vent).
Éoliennes utilisant les machines synchrones
Différentes topologies sont disponibles dans ce type de système éolien, et chaque topologie présente des avantages et des inconvénients. Cependant il y a deux topologies qui sont les plus répandues et qui sont devenues très compétitives par rapport aux systèmes utilisant les machines asynchrones: la génératrice synchrone à rotor bobiné et la génératrice synchrone à aimant permanent.
Génératrice synchrone à rotor bobiné
Dans ce type, la connexion directe des enroulements statoriques au réseau est impossible à cause de la variation de la fréquence de la tension générée, cette dernière dépendant de la vitesse de rotation du rotor et par conséquent de la vitesse du vent. Pour cela le stator doit être connecté au réseau par l’intermédiaire d’un convertisseur dos à dos séparé par un bus continu ; le convertisseur côté rotor convertit la tension générée par la génératrice en tension continue et permet également le contrôle de la vitesse de rotation. Le bus continu joue le rôle de régulateur de tension continue, il réagit généralement comme une source de tension; le convertisseur côté rotor permet de convertir la tension continue en tension alternative, avec une amplitude et une fréquence similaire à celles du réseau, il assure aussi la récupération d’un maximum de puissance et l’injecte au réseau avec la compensation de la puissance réactive.
Ce type de génératrice présente plusieurs avantages par rapport à d’autres types tels que :
./ L’élimination du multiplicateur; couplage direct à l’éolienne;
./ Un meilleur rendement par rapport aux génératrices asynchrones, parce que le courant statorique est utilisé pour la génération du couple électromagnétique;
./ Un fonctionnement sur une large gamme de vitesse .
Cependant ce système basé sur une GSRB nécessite une maintenance régulière du système des contacts glissants, et il exige un circuit externe d’ excitation assuré par un redresseur connecté au réseau.
Chapitre 1 – INTRODUCTION |