Sommaire: Cours et TP utilisation de l’automate programmable
RESUME THEORIQUE
I. Raccordement d’un automate programmable
I.1 Introduction
I.2 Structure fonctionnelle de l’automate
I.2.1 Interface d’entrée
I.2.2 L’unité centrale
I.2.3 Interface de sortie
I.2.4 Communication et dialogue
I.3 Description desautomates
I.3.1 AutomateMonobloc
I.3.2 Automate Modulaire
I.4 Les applications de l’automate
I.5 Les différents modules d’entrée/ sortie
I.5.1 Interface d’entrée
I.5.2 Interface de sortie
I.6 Les étapes à suivre pour raccorder un automate
II. Les Langages de programmation
II.1 Langage à contacts
II.2 Langage GRAFCET
II.3 Présentation du langage liste d’instructions.
III. Les principales instructions d’un automate
IV. L’utilisation d’un logiciel de programmation.
IV.1 Les logiciels de programmation
IV.2 Utiliser un logicielde programmation.
IV.3 Les moyens d’accès aux fonctions d’un automate
IV.4 La méthode de programmation : (Résumé)
V. Diagnostic des problèmes de fonctionnement d’un automatisme simple
commandé par un automate
V.1 Visualisation centralisée
V.2 Les problèmes de fonctionnementd’un automate programmable
V.3 Les modifications apportées au programme d’un automate
VI. L’essai d’un automatisme simple commandé par un automate.
VI.1 Les dangers potentiels liés à l’utilisation d’un automate
VI.2 L’essai d’un automatisme simple
GUIDE DES EXERCICES ET TRAVAUX PRATIQUES
Exercices
TP 1 : raccordementd’un automate.
TP2: Utilisation d’un logiciel de programmation.
TP2-1
TP2-2
TP2-3
TP2-4
TP2-5
TP2-6
TP2-7
TP2-8
Evaluation de fin de module
Liste bibliographique
Extrait du cours et TP utilisation de l’automate programmable
I. Raccordement d’un automate programmable
I.1 Introduction
Les automatismes sont réalisés en vue d’apporter des solutions à des problèmes de nature technique, économique ou humaine.Eliminer les tâches dangereuses et pénibles, en faisant exécuter par la machine les tâches humaines complexes ou indésirables.Améliorer la productivité en asservissant lamachine à des critères de production, de rendement ou de qualité. Piloter une production variable, en facilitant le passage d’une production à une autre. Renforcer la sécurité en surveillant et contrôlant les installations et machines.On distingue dans tout système automatisé la machine ou l’installation et la partie commande constituée par l’appareillage d’automatisme. Cette partie commande est assurée par des constituants répondant schématiquement à quatre fonctions de base :
– L’acquisition des données
– Le traitement des données
– La commande de puissance
– Le dialogue homme machine
I.2 Structure fonctionnelle de l’automate
L’automate programmable industriel est un appareil qui traite les informations selon un programme préétabli.
Son fonctionnement est basé sur l’emploi d’un microprocesseur et de mémoires.
I.2.1 Interface d’entrée
Elles permettent d’isoler électroniquement le circuit externe (saisie de l’information) du circuit de traitement.
I.2.2 L’unité centrale
cœur de l’automate, elle est constituée:
– d’un processeur qui exécute le programme
– de mémoires qui, non seulement contiennentce programme, mais aussi des informations de données (durée d’une temporisation, contenu
d’un compteur)
Les types de mémoires :
Mémoires vives:
RAM – Random Access Memory ( Mémoire à accès aléatoires)
Ce sont des mémoires volatiles lues et écrites par le processeur.
Mémoires mortes:
ROM– Read only memory
PROM – ROM programmable
NE PEUVENT PAS ETRE EFFACES
REPROM– effacement par UV
EEPROM – effacement électrique
I.2.3 Interface de sortie
Elles permettent de commander les sorties toute ou rien (TOR) telle que : les contacteurs, les moteurs pas à pas, les électrovannes et ainsi des sorties analogiques (boucle de régulation débit température et variateur de vitesse.)
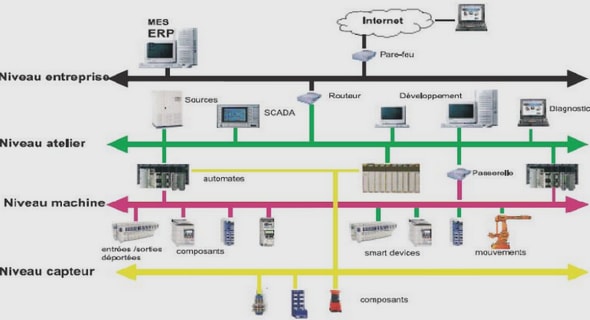
I.2.4 Communication et dialogue
Elle est réalisée avec l’opérateur par un pupitre de dialogue ou par l’intermédiaire d’un ordinateur et avec les autres automates pour un réseau informatique local.
I.3 Description des automates
Il existe deux types d’automate programmable industriel:
• le type monobloc
• le type modulaire
Le typemonoblocpossède généralement un nombre d’entrées et de sorties restreint et son jeu d’instructions ne peut être augmenté. Bien qu’il soit parfois possible d’ajouter des extensions d’entrées/sorties, le type monobloc a pour fonction de résoudre des automatismes simples faisant appel à une logique séquentielle et utilisant des informations tout-ou-rien. (voir figure1-2)
I.3.2 Automate Modulaire
Par ailleurs, le typemodulaireest adaptable à toutes situations. Selon le besoin, des modules d’entrées/sorties analogiques sont disponibles en plus de modules spécialisés tels: PID, BASIC et Langage C, etc. La modularité des API permet un dépannage rapide et une plus grande flexibilité.La figure 1-4 présente un automate modulaire.
…….
Cours et TP utilisation de l’automate programmable (1355 KO) (Cours PDF)