Télécharger le fichier original (Mémoire de fin d’études)
Les systèmes d’aide aujourd’hui
Dans les visualisations de supervision radar opérationnelles en France, as-sez peu d’automatisation est intégrée et un nombre limité d’informations sont remontées du système de traitement radar pour être notifiées. Néan-moins, plusieurs systèmes d’aide à l’organisation du trafic et d’alerte sont aujourd’hui en exploitation ou en cours de déploiement. Parmi les systèmes d’alerte utilisés, le plus ancien est le filet de sauvegarde ou STCA (Short Term Conflict Alert – années 80) dont le rôle est de détecter les conflits entre aéronefs, c’est-à-dire des trajectoires amenant des avions à passer à une distance inférieure à la norme de séparation minimale (1000 pieds et 5 miles nautiques) et prévenir le contrôleula couleur pour alerter l’opérateur lors de conditions anormales ou à risques. Les supervisions radar utilisent de très grands écrans (par exemple écrans de 30’’ 16/9 ou 2000×2000 28’’ carrés comme en France). Sur des écrans de cette taille, des notifications risquent d’être montrées aux contrôleurs en vision périphérique. Le choix de la cou-leur utilisée pour les représenter est donc crucial puisque la perception des couleurs n’est pas uniforme avec l’angle visuel ; par exemple, le vert est très mal perçu à 30 ° du centre de vision, mais le jaune est bien mieux discriminé en vision périphérique (Ancman, 1991).
Lorsque des informations doivent être notifiées concernant un avion par-ticulier comme dans le cas de l’alerte STCA, elles sont représentées sur ‘l’étiquette radar’ (Figure 4 : l’étiquette radar). La position courante de l’avion est affichée par le symbole tête de chaine, un guideur relie l’étiquette radar à celui-ci. Les positions passées de l’avion sont représentées avec la comète radar qui montre des symboles réduisant en taille en fonction du vieillissement de l’information position ; la comète radar montre 56s de positions passées. Les informations concernant l’avion sont stockées dans l’étiquette radar, elle est composée de plusieurs lignes (L0 à 4) dont cer-taines affichées de façon optionnelle en fonction du statut de l’avion pour le secteur de contrôle. La vitesse de l’avion est donnée par le vecteur vitesse, qui est tracé entre le symbole tête de chaine et la position extrapolée de l’avion à X minutes, sa longueur est modifiable par le contrôleur (2 min sur la figure suivante).
Deux types de designs sont utilisés pour notifier des informations aux contrôleurs ; ils s’appliquent à des warnings ou des alertes (Figure 5 : alerte filet de sauvegarde). Pour représenter un warning, un champ d’information texte va être montré en rouge orangé en L0 de l’étiquette radar, pour représenter une alerte, le champ d’information texte clignote en utilisant deux couleurs (blanc 200ms vers rouge orangé 800ms) et le guideur reliant l’étiquette ra-dar à la comète est représenté en rouge orangé clignotant également.
Clignotement Texte ALRT: Rouge pendant 800ms alternant avec le Blanc pendant 200ms + clignotement du guideur (Rouge(800ms) et Blanc(200ms)
Tous les avions sont équipés d’un transpondeur interrogé périodiquement par des radars secondaires. Celui-ci renvoie un code sur quatre digits en octal. Certains codes permettent au pilote de prévenir le contrôle aérien en cas de détournement (hijack symbolisé par HJCK), de panne radio (radio off : RDOF) ou de détresse (emergency : EMRG). Ce type d’information est affiché dans la première ligne de l’étiquette avec un texte en rouge orangé non clignotant. En cas d’apparition ce type de code nécessite une prise en compte rapide par le contrôleur ; il s’agit d’évènements très rares. Lorsque le contrôleur n’est pas certain de l’identification de l’avion, il peut demander au pilote d’activer le mode IDENT de son transpondeur ce qui se tradui-ra sur l’image radar par le texte IDEN en ligne 0 de l’étiquette. Certains espaces aériens nécessitent des niveaux d’équipement de radio navigation spécifique, par exemple une précision accrue de son système de mesure de l’altitude (pour les zones RVSM, Reduced Vertical Separation Minima). En fonction du niveau d’équipement de l’avion, si celui-ci pénètre une zone né-cessitant un niveau d’équipement supérieur au sien, le contrôleur sera de la même façon prévenu avec un texte en rouge orangé en ligne 0. On peut constater que dans ces informations définies comme des Warning, certaines d’entre elles n’ont pas le même niveau de criticité pour le contrôleur, un détournement aérien par exemple étant bien plus grave qu’une notification RVSM, mais ils sont représentés avec le même design.
L’alarme STCA représentée par le texte ALRT clignotant en ligne 0 de l’éti-quette, correspond au déclenchement du filet de sauvegarde ; ce système a pour but de détecter les pertes de séparation entre aéronefs et prévenir le contrôleur à temps pour changer leur trajectoire. Dans l’espace aérien, hors zones spéciales, 5 miles nautiques (environ 9 km) en longitudinal et 1000 pieds (300m) en vertical doivent être maintenus entre les aéronefs. Le STCA n’est pas un système anti-abordage comme le TCAS (Trafic Collision Avoidance System) embarqué à bord des appareils qui ne nécessite pas d’ac-tion du contrôle aérien ; les contrôleurs sont avertis plusieurs dizaines de secondes avant la perte de séparation. Du point de vue opérationnel, ce type d’alerte est considéré comme très important et nécessite une action rapide du contrôleur ; cependant, dans certaines conditions, le système ne connaissant pas les ordres donnés aux pilotes par le contrôleur, le STCA peut détecter une future perte de séparation sur des avions évolutifs. L’alarme est alors considérée comme intempestive. Il s’agit d’une notification de premier ordre dans les spécifications de l’image radar, et il y est dit que l’alarme doit être vue en vision périphérique, mais sans contrainte de performance en termes de temps de détection moyen de la notification par les contrôleurs.
D’autres systèmes spécifiques à l’approche sont en place dans ces aéroports comme MSAW (Minimum Safe Altitude Warning) qui détecte les trajectoires dangereuses, car risquant d’amener un avion en descente sur le relief ou APW (Area Proximity Warning), un système de détection d’intrusion dans des zones prohibées (zones militaires, de parachutage, centrales nucléaires etc..). Toujours au niveau de l’approche, un système d’aide MAESTRO (Moyen d’Aide à l’Ecoulement Séquence du Trafic avec Recherche d’Optimi-sation) permet au contrôleur d’approche de préparer la séquence d’arrivée à l’aide d’une représentation temporelle de cette séquence sur un agenda. Au niveau de la supervision radar en-route opérationnelle, les contrôleurs disposent d’outils très simples pour mettre en évidence des vols au niveau de la visualisation manuellement et quelques notifications les prévenant de situations anormales ainsi que les alertes STCA décrites précédemment. Ils ne disposent actuellement d’aucune aide à la décision.
En Europe d’autres systèmes sont aujourd’hui en service pour les centres en-route. Celui de Maastrich utilise des données en provenance des avions (Downlink Aircraft Parameters) concernant l’altitude sélectionnée sur le système de gestion du vol et les corrèle avec les informations renseignées par les contrôleurs sur leur supervision radar ; en cas d’incohérence, une alarme est remontée au contrôleur. Dans le centre Suisse, un système de détection de conflits à moyen terme (MTCD : Medium Term Conflict De-tection) est déployé. Il permet en réalisant une extrapolation horizontale de la position de l’avion de trouver les conflits potentiels et de l’aider à les résoudre en amont du déclenchement du filet de sauvegarde.
Évolutions futures
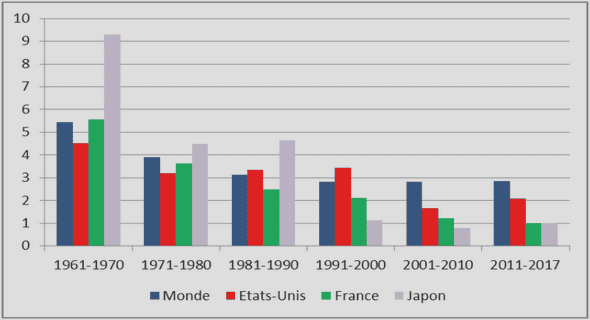
Des statistiques en provenance de la Direction Générale de l’Aviation Civile montrent que ces 27 dernières années hormis pendant la période suivant l’attentat du 11 Septembre 2001, le trafic aérien au-dessus de la France a augmenté régulièrement. Il s’établissait à 166M de passagers en 2012 (Figure 6 : évolution du trafic en France entre 1988 et 2012 ; radial : Paris/ province, transversal : province/province (source DGAC/DTA/SDE)). Les projections d’évolutions de ce trafic pour les 20 années à venir tablent sur une augmentation de 4.6% par an. Les conséquences pour la gestion du tra-fic aérien seront considérables.
En France, pour le court et moyen terme, deux projets sont en cours de développement industriel. Le projet EEE (ERATO Environnement Electro-nique) qui doit être mis en service en 2015, met fin à l’utilisation du strip et propose une interface de supervision (Figure 7 : EEE ERATO Environne-ment Electronique) disposant de fonction de saisie des clairances de contrôle (consignes données par le contrôleur aux pilotes dans son secteur), de fonc-tions d’aide à la décision et d’un agenda manuel permettant au contrôleur de créer des étiquettes avec des conflits qu’il a identifié sur une échelle de temps montrant les 10 prochaines minutes de la séquence de contrôle (par-tie droite de la supervision). Pour aider les contrôleurs dans leur activité de résolution de conflits, un filtrage permet de mettre en évidence (design différent) des avions pertinents par rapport à un vol de référence de façon à aider le contrôleur à analyser plus rapidement la situation. Ce filtrage est basé sur des hypothèses sur le comportement du vol et du contrôleur. Il permet par ailleurs d’avoir une estimation de l’impact d’une consigne sur un vol de référence sur le trafic avoisinant (filtrage simulé).
Figure 7 : EEE ERATO Environnement Electronique
Le deuxième, 4Flight, est un partenariat entre le fournisseur de service de contrôle Italien (ENAV) et la France ; c’est la prochaine évolution du sys-tème de gestion du trafic aérien. Il comprend une nouvelle supervision radar et intégrera les outils présents dans EEE ainsi qu’un nouveau système de traitement de plan de vol (CoFlight) qui permettra de faire une prédiction de trajectoire plus précise (prédiction 4D) et d’échanger des informations avec les autres centres et les avions par datalink (canal de données sol-bord). Le développement est en cours pour une cible de mise en tests dans deux centres de contrôle en-route pilotes en 2015, et une généralisation à tous les centres d’ici 2020. Les commissions de sécurité recommandent ré-gulièrement des évolutions du système de notification et particulièrement dans le cas du filet de sauvegarde. Celles-ci sont prises en compte dans le développement de 4-Flight.
Au niveau de l’Europe, pour le moyen et long terme, deux projets sont en cours pour essayer de répondre aux enjeux de cette croissance du trafic, le projet de ciel unique SES (Single European Sky) et le projet SESAR (Single European Sky ATM Research).
Dans le projet de Ciel Unique Européen, l’espace aérien couvrant l’Europe est découpé en blocs fonctionnels (volumes d’espace) regroupant plusieurs pays, la France fait partie du FABEC (Functional Airspace Block Europe Central). La création de ces blocs fonctionnels permettra de s’affranchir des frontières des états et réduire la fragmentation de l’espace aérien.
Le projet SESAR a pour but de moderniser l’infrastructure de contrôle aérien à l’échelle de l’Europe pour les 30 prochaines années. La phase de définition du projet s’est terminée en 2008, la phase de développement est en cours. De nouvelles technologies sont apparues dans le domaine aéronautique permet-tant de partager des informations entre les différents acteurs (compagnies aériennes, aéroports, services de navigation aérienne). En utilisant ces in-formations et moyens de communications, SESAR permettra de développer de nouveaux concepts visant à une meilleure intégration des systèmes qui aboutiront entre autres à la réduction des délais d’attente au sol ou en vol.
Parmi les concepts testés, le free flight (pas de contrôle aérien centralisé), la business trajectory (trajectoire optimisée en fonction de critères propres à chaque opérateur aérien), la déconfliction des trajectoires (des changements limités de vitesse en amont des conflits pour les faire disparaître), la déléga-tion de responsabilité sol-bord ou bien l’utilisation de nouveaux moyens de navigation comme le satellite (GALILEO) pour concevoir de nouveaux types de procédures. SESAR est découpé en 16 Work Packages (WP), portants sur des aspects spécifiques (par exemple WP4 : en-route, WP6 : approche). SESAR a aussi pour but de favoriser la recherche à long terme et finance un nombre important de projets de recherche dans le cadre du paquet WP E :
Innovative Research.
Les travaux présentés dans cette thèse ont été développés dans le cadre du WP4.7.2 portant sur la position de contrôle en-route. Il comporte deux vo-lets, le premier concerne le développement et la mise en œuvre d’un outil permettant de diminuer le nombre de conflits potentiels en agissant sur la vitesse des avions de façon anticipée, le second porte sur une position de contrôle innovante permettant d’intégrer cet outil. Ces légères modifications de vitesse permettent dans un nombre important de cas d’assurer une sé-paration suffisante sur les points de conflits de façon à limiter la charge de travail induite aux contrôleurs. Le deuxième volet, dans lequel ces travaux sont insérés, concerne la position de travail des contrôleurs aériens et plus spécifiquement la visualisation de supervision radar. L’automate d’aide à la résolution de conflit n’est pas en mesure de résoudre tous les problèmes détectés ; les conflits résiduels non traités, mais connus de l’agent intelligent doivent être présentés aux contrôleurs de façon à limiter les ressources né-cessaires à la détection de ces conflits. Par ailleurs lorsqu’un conflit est géré par l’automate, il est nécessaire d’en informer le contrôleur de façon à éviter une intervention inappropriée qui pourrait complexifier la situation au lieu de l’arranger. Pour assurer un fonctionnement nominal de l’automate ainsi que des outils de prévision de trajectoire des avions, il est nécessaire de ren-seigner le système avec les ordres donnés par le contrôleur aux avions sous sa responsabilité. Les conséquences de ces changements sont considérables pour la méthode de travail actuelle des contrôleurs. L’intégration d’un agent intelligent en mesure d’agir sur le trafic aérien et d’aider le contrôleur à détecter les situations conflictuelles résiduelles va transformer significati-vement le rôle du contrôleur pour l’obliger à établir un lien de confiance avec un automate et déléguer une partie de sa responsabilité concernant le maintien des séparations entre aéronefs. L’objectif de la visualisation radar en-route développée dans le cadre du projet SESAR WP4.7.2 est de per-mettre d’assurer un bon couplage entre humain et automate et faciliter la gestion d’un nombre très important d’avions tout en renseignant le système de façon performante.
Erreurs humaines dans le domaine aéronautique
Dans l’ATC, les incidents et accidents sont analysés périodiquement par des commissions qui établissent les causes et facteurs contributifs dans le but d’améliorer la sécurité. En France, l’analyse d’un évènement se déroule en quatre étapes : le recueil des faits, l’identification des causes, la classi-fication de l’évènement et l’éventuelle proposition d’actions préventives ou correctives. Les résultats d’analyse sont stockés dans une base de données. Depuis 2011 la grille RAT (Risk Analysis Tool) est utilisée pour classer les incidents. L’Europe, la FAA (Federal Aviation Administration – USA) et ATNS (Air Traffic and Navigation Service – Nouvelle Zélande) utilisent aussi RAT. La méthode d’analyse mise en place en France consiste à réa-liser un arbre de causes pour identifier causes et facteurs contributifs. Les évènements sont classés à l’aide de la grille RAT qui liste les cas possibles d’incidents répertoriables par gravité et probabilité de nouvelle occurrence. Les alertes filets de sauvegarde aboutissant à un passage sous les minimas de séparation (1000ft 5Nm) font l’objet le plus souvent d’un incident et d’une analyse, les rapprochements de deux vols (nommés HN) sont classés en fonc-tion du degré de franchissement des minima (HN50 = passage sous 50% des minima). Les évènements étudiés en 2011 – 34 cas (Figure 8 : causes et fac-teurs contributifs aux incidents 2011) font émerger 3 catégories importantes 24 % d’entre eux sont liés à un travail en marge ou en surcharge amenant à une stratégie inadaptée dans 20 %. des cas, dans 17 % des cas la gestion de l’attention est mise en cause. Les bilans de l’Instance de Traitement des Evè-nements de Sécurité (ITES) aboutissent à des recommandations concernant les outils les méthodes de travail consignes et rappels ou des REX (Retour d’EXpérience) sur des analyses d’incidents particuliers. Par exemple, une recommandation de 2011 concernant les outils suggère un renforcement du design de l’alarme STCA sur le secteur de contrôle, car des problèmes liés à sa perception ont été mis en évidence dans certains cas.
Les conséquences d’accidents dans le domaine de l’aviation peuvent être considérables. Les défaillances peuvent provenir de trois sources selon Rea-son (1990), les défaillances techniques, les défaillances liées à des facteurs organisationnels et les erreurs humaines. Le domaine aéronautique est considéré comme ayant atteint un haut niveau de sécurité, l’essentiel des incidents et accidents sont donc liés à des erreurs humaines (Kinney, et al., 1977; FAA, 1990). Parmi ces erreurs, on trouve les interactions vocales et incompréhensions entre le contrôle aérien et les équipages (Cushing, 1994,1995) spécifiques à cette activité. Toujours selon Reason (1990), le terme d’erreur couvre tous les cas où une séquence planifiée d’activités men-tales ou physiques ne parvient pas à ses fins désirées, et quand ces échecs ne peuvent être attribués à l’intervention du hasard. Les erreurs humaines sont inévitables, elles font partie de notre nature ; leur étude permet entre autres d’améliorer la connaissance sur un système dans le but d’optimiser le couplage humain-système.
Figure 8 : causes et facteurs contributifs aux incidents 2011- Rapport Sécurité Circulation Aérienne n°52
Une étude de la CAA anglaise (Civil Aviation Authority) de 2009, analy-sant les accidents (crashs) dans l’aviation commerciale entre 1997 et 2006 dans le monde, montre que l’erreur humaine est la cause de 2/3 de ceux-ci. L’essentiel de ces erreurs est lié à des décisions inappropriées elles-mêmes liées à une mauvaise conscience de la situation. La capacité à développer une représentation mentale de la situation courante et d’arriver à projeter son état futur a été décrite par Endsley (1995) sous le concept de conscience de la situation (Situation Awareness ou SA). La définition généralement employée est :
« La conscience de la situation est :
●● la perception des éléments de l’environnement dans le temps et l’espace (SA1)
●● la compréhension de leur signification (SA2)
●● la projection de leur statut dans un futur proche (SA3)
Les causes de ces erreurs humaines peuvent être catégoriées en fonction du niveau de conscience de la situation (SA1|2|3). Dans le domaine du contrôle aérien, une analyse des erreurs opérationnelles conduite aux États-Unis utilisant cette classification (Endsley & Rodgers, 1998) a montré que (certaines erreurs peuvent porter sur plusieurs catégories) :
●● 71 % concernent le niveau SA1 dont :
35.7 % dues à l’incapacité à suivre tous les paramètres
21.4 % dues à mauvaise perception
14.3 % dues à problème de mémoire
●● 21.4 % concernent le niveau SA2
●● 28.6 % concernent le niveau SA3
Basée sur le modèle de la conscience de la situation, une taxonomie des erreurs en fonction du niveau de conscience de la situation a été établie par Endsley (1995) :
SA1 : informations non perçues correctement
●● données non disponibles
●● données difficiles à discriminer ou détecter
●● défaut de surveillance des données
●● perception erronée des données
●● perte de mémoire
SA2 : informations mal intégrées ou mal comprises
●● Absence ou modèle mental pauvre
●● Modèle mental incorrect
●● Une dépendance excessive aux valeurs par défaut
●● Autres
SA 3 : incapacité à projeter l’état du système ou les actions futures
●● Absence ou modèle mental pauvre
●● Projection des tendances actuelles excessives
●● Autres
Cette liste n’est pas exhaustive et d’autres approches classifiant ou modélisant les erreurs sont utilisées. Dans le domaine aéronautique, le modèle de Reason GEMS (Generic Error Modelling System, 1993) est très largement employé. Il catégorise les erreurs suivant trois types : les lapsus, les fautes et les ratés et les classifie en fonction des niveaux de contrôle cognitif décrit par Rasmussen (1994) dans son modèle Skill-Rules-Knowledge. (cf. 3.5.1). Hollnagel (1993) propose une autre approche et classifie les erreurs en fonction de leurs aspects observables et leurs facteurs contributifs.
Résumé
Établir une bonne conscience de la situation est la pierre angulaire de la supervision des systèmes critiques. Le contrôle aérien est dans une période de changement majeur, le trafic en augmentation quasi constante depuis les années 60, les prévisions d’évolution tablant sur une croissance supérieure à 4% pour les vingt prochaines années sont un enjeu considérable pour la gestion du trafic aérien. Partout dans le monde, les fournisseurs de service de navigation aérienne font évoluer leurs systèmes pour augmenter sa ca-pacité tout en voulant maintenir un haut niveau de sécurité. En Europe le projet SESAR est l’initiative commune visant à moderniser ces systèmes. La réponse à ces objectifs est le développement de l’automatisation à tous les niveaux du système de gestion du trafic aérien par la mise en œuvre de nouveaux outils de filtrage ou d’aide à la décision, d’outils de régulation du trafic sans action du contrôleur ou du pilote ou de nouveaux moyens d’échange d’informations sol/bord. Dans ce contexte, les interfaces de super-vision des contrôleurs aériens auront toujours plus d’informations à afficher qui s’ajouteront ou feront évoluer les interfaces existantes. L’acquisition et la mémorisation des informations présentées sur la supervision radar ainsi que la perception des notifications issues du système sont le prérequis né-cessaire à l’établissement de la conscience de la situation des contrôleurs aériens.
Les systèmes dans le domaine aéronautique, aussi bien au niveau du sol que du bord ont atteint un niveau très élevé de fiabilité et de sécurité, mais les analyses d’incidents montrent que l’humain est la source principale d’er-reur. Dans ces erreurs humaines, les deux tiers sont liées à des problèmes de perception ou de mémorisation des informations c’est-à-dire le niveau 1 de la situation awareness : la perception des éléments de l’environnement dans le temps et l’espace. Pour maintenir ce haut niveau de sécurité, les nouveaux systèmes devront prendre en compte cette problématique et ses éventuelles interactions avec l’automatisation.
L’interaction entre l’humain et la visualisation ainsi que le système automa-tisé est au centre de ce travail de recherche ; le prochain chapitre traite donc de la perception des informations dans les visualisations et plus particuliè-rement des visualisations de type supervision et de leurs caractéristiques.
Table des matières
Introduction
Partie I : contexte théorique
1. LE SYSTÈME DE GESTION DU CONTRÔLE AÉRIEN ET SES ÉVOLUTIONS
1.1. Présentation du système de contrôle aérien actuel
1.1.1. Organisation du système de contrôle aérien
1.1.2. Les systèmes d’aide aujourd’hui
1.2. Évolutions futures
1.3. Erreurs humaines dans le domaine aéronautique
1.4. Résumé
2. CONTRAINTES ET OBJECTIFS DES VISUALISATIONS DE TYPE SUPERVISION
2.1. Introduction
2.2. Perception des informations dans les systèmes de visualisation
2.2.1. Variables visuelles
2.2.2. Perception avec faible charge cognitive
2.2.3. Approche écologique de la perception et design écologique
2.2.4. Design orienté conscience de la situation
2.3. Les systèmes de notifications visuelles et sonores, et leurs limites
2.3.1. Notifications visuelles
2.3.2. Notifications sonores
2.4. Résumé
3. AUTOMATISATION ET ADAPTATION
3.1. Introduction
3.2. Niveaux d’automatisation
3.3. Impact de l’automatisation sur l’humain
3.4. Confiance dans le système
3.5. Automatisation et conscience de la situation
3.6. Interrompre à quel prix ?
3.7. Modalités d’initiative et automatisation adaptative
3.8. Résumé
4. STRATÉGIE MÉTHODOLOGIQUE
4.1. De l’étude de laboratoire à l’opérationnel
4.1.1. Etudes de laboratoire
4.1.2. Tests de laboratoire appliqués au contexte : les micro-mondes
4.1.2.1. Un micro monde aéronautique en contexte multitâche : MATB
4.1.2.2. Un micro monde ATC pour l’évaluation du travail collaboratif : CTEAM
4.1.2.3. Un micro-monde pour l’ATC : Laby
4.1.3. Environnements de simulations complexes
4.2. Évaluation de l’utilisation d’une interface homme-machine
4.2.1. Utilisation de méthodes d’évaluation subjectives
4.2.2. Mesures comportementales
4.2.3. Mesures physiologiques
4.2.3.1. Mesures oculométriques
4.2.3.2. Mesures neurophysiologiques
4.2.3.2.1. Méthode continue
4.2.3.2.2. Méthode ERP (Evoked Related Potential)
4.3. Résumé
Problématique de la thèse
Partie II : Développements et Validation
5. CONCEPTION D’UN DESIGN ORIENTÉ CONSCIENCE DE LA SITUATION
5.1. Introduction
5.2. Évaluation du design de notifications visuelles
5.2.1. Évolutions de Laby vers un environnement de test multitâche
5.2.2. Conception du labyrinthe de l’expérimentation Saillance
5.2.3. Types de notifications évaluées
5.2.4. Architecture de la plateforme Laby, intégration d’un oculomètre
5.3. Confrontation de notifications visuelles à des notifications sonores
5.4. Réalisation d’un agent de suivi de la tâche de supervision des contrôleurs aériens : SAmonitoring
5.4.1. Suivi des clairances de niveau de vol
5.4.2. Suivi des consignes de vitesse
5.4.3. Suivi des consignes de directe
5.4.4. Suivi des états de coordination et des états fréquences
5.4.5. Suivi du niveau d’entrée dans le secteur
5.4.6. Suivi des niveaux de transfert en sortie
5.5. Intégration de SAmonitoring dans un simulateur d’étude
5.5.1. Architecture Droïd et intégration d’un dispositif oculométrique
5.5.2. Intégration des données de SAmonitoring dans la supervision radar
5.5.3. Retour d’expérience de l’intégration d’oculomètre dans un simulateur d’étude
6. ÉVALUATION DE DESIGNS DE NOTIFICATIONS VISUELLES : L’EXPÉRIMENTATION SAILLANCE
6.1. Présentation
6.2. Protocole
6.2.1. Participants
6.2.2. Procédure de passation
6.2.3. Hypothèses de travail
6.2.4. Variables
6.3. Résultats
6.3.1. Réalisation de la tâche de guidage
6.3.2. Réalisation de la tâche de validation des notifications
6.3.3. Résultats oculométriques
6.3.4. Résultats qualitatifs
6.4. Conclusion
6.4.1. Analyse des résultats
6.4.2. Discussion et applications
7. ÉVALUATION DE DESIGNS VISUELS CONFRONTÉS À DES NOTIFICATIONS SONORES : L’EXPÉRIMENTATION BIP
7.1. Présentation
7.2. Protocole
7.2.1. Participants
7.2.2. Procédure de passation
7.2.3. Hypothèses de travail
7.2.4. Variables
7.3. Résultats
7.3.1. Réalisation de la tâche de guidage
7.3.2. Réalisation de la tâche de validation des notifications
7.3.3. Réalisation de la tâche auditive
7.3.4. Résultats physiologiques, analyse de la P300
7.3.5. Résultats qualitatifs
7.4. Conclusion
7.4.1. Analyse des résultats
7.4.2. Discussion et applications
8. ÉVALUATION D’UNE VISUALISATION ORIENTÉE CONSCIENCE DE LA SITUATION : LES EXPÉRIMENTATIONS MONITORING & WP4.7.2
8.1. Présentation
8.2. Protocole
8.2.1. Participants
8.2.2. Hypothèses de travail
8.2.3. Variables
8.2.4. Procédure de passation expérimentation Monitoring
8.2.5. Procédure de passation expérimentation WP4.7.2
8.3. Résultats
8.3.1. Résultats quantitatifs
8.3.1.1. Expérimentation Monitoring
8.3.1.2. Expérimentation WP4.7.2 sans oculométrie
8.3.2. Résultats qualitatifs
8.4. Conclusion
9. CONCLUSION
9.1. Bilan et synthèse des résultats
9.2. Perspectives de recherche
9.2.1. Utilisation dynamique de la détection de l’état cognitif : le projet NINA
9.2.2. Extension aux notifications haptiques
9.2.3. Évaluation de nouveaux designs de notifications
9.3. Contributions
9.3.1. Contributions scientifiques
9.3.2. Réalisations
Références Bibliographiques
Table des illustrations
Annexes
Conception d’une tâche expérimentale avec Laby
Questionnaire Monitoring Condition : Sans monitoring
Questionnaire Monitoring Condition : Avec monitoring
Questionnaire alertes visuelles