La technique FRA
L’apparition d’un défaut dans le réseau électrique provoque la circulation de forts courants de court-circuit dans le transformateur, induisant des champs parasites dans celui-ci. Ces champs produisent des forces axiales et radiales sur les enroulements du transformateur. La structure mécanique et les enroulements du transformateur sont donc soumis à de fortes sollicitations mécaniques. Les contraintes imposées aux transformateurs de puissance peuvent entraîner des déformations mécaniques ou des défauts dans leurs enroulements et leurs noyaux magnétiques [15]. Le diagnostic efficace de ce type de déformation peut être mis en évidence grâce à l’analyse de la réponse en fréquence (FRA) des enroulements du transformateur. Le présent chapitre a pour objet de présenter la méthode de diagnostic basée sur la FRA, son principe, les moyens utilisés, la méthode de mesure et la façon d’interpréter les résultats.
L’équipement de mesure
Le matériel nécessaire pour mener une bonne mesure de l’analyse de la réponse en fréquence se compose des éléments suivants:
a) Le FR Analyzer Le FRAnalyzer est un analyseur de réponse au balayage en fréquence pour le diagnostic des enroulements de transformateur de puissance. Son concept matériel universel commandé par un logiciel opérant sur un PC fait du FR Analyzer un outil efficace et d’une grande souplesse d’emploi pour le diagnostic des enroulements et des noyaux magnétiques des transformateurs de puissance [15]. Le FRAnalyzer mesure la réponse en fréquence des enroulements d’un transformateur sur une large plage de fréquences et compare cette réponse à celle qu’on obtiendrait pour un enroulement en bon état. Les écarts de la réponse en fréquence permettent de révéler de nombreux types de défauts différents sur les enroulements et les noyaux magnétiques des transformateurs. L’équipement standard FR Analyzer permet d’effectuer des mesures de la fonction de transfert de tension, par balayage de la fréquence [15]. Le FR Analyzer inclut un signal source DDS (synthèse numérique directe), de niveau et de fréquence réglables, pour exciter l’enroulement du transformateur, deux récepteurs assurant le traitement de la réponse de l’enroulement et un microcontrôleur. Un convertisseur d’alimentation CC génère les tensions d’alimentation des circuits concernés [15].
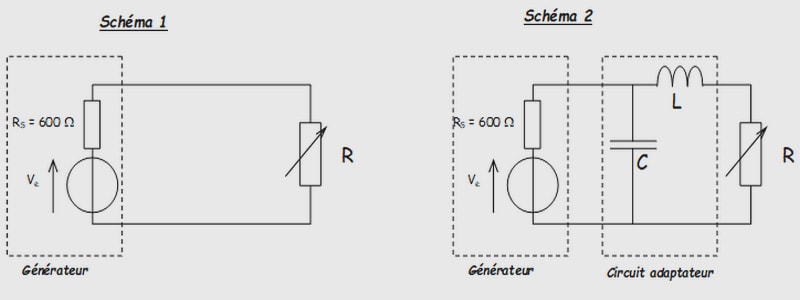
c) Cables pour les essais L’approche recommandée consiste à utiliser trois câbles blindes haute fréquence (ayant une impédance caractéristique connue et constante) pour les mesures de FRA : un pour l’injection de tension, un pour la mesure de la tension de référence sur la borne d’entrée et un pour la mesure de la tension de réponse. La longueur des câbles haute fréquence doit être suffisante pour atteindre les bornes alors que l’équipement d’essai est installes au pied du transformateur. Il est nécessaire d’adapter l’impédance des câbles à haute fréquence afin d’éviter les réflexions. L’impédance est en générale adaptée à 50 ohms à l’entrée de l’appareil de mesure [17]. Pour diminuer l’inductance, il est recommande d’avoir des rallonges de câbles aussi courtes que possible (sans faire de boucles) (voir Fig. II.3) et d’utiliser des tresses plates (de 20 mm de large au minimum) au lieu de fils [17].
Objectifs des mesures par FRA
Le principal intérêt des mesures par FRA sur les transformateurs est de détecter des déformations des enroulements qui peuvent résulter des forces électromagnétiques très importantes qui s’exercent du fait des surintensités apparaissant au moment de défauts directs, de défauts dans le régleur, de mauvaises synchronisations [17]. La déformation d’un enroulement peut finalement provoquer un défaut dans le transformateur par suite d’une détérioration de l’isolement entre spires, chose qui provoque la diminution de la tenue diélectrique et aboutir à des spires court-circuitées. En outre, tout desserrage de la fixation d’un enroulement, suite à un amincissement de l’isolation dû au vieillissement, augmente le risque de défaut par diminution de la tenue mécanique des assemblages de l’enroulement [17]. En plus du diagnostic des défauts à la suite de court-circuit, on remarque un intérêt croissant qui porte à la détection avant l’apparition de la panne, au moment des inspections programmées, de défauts liés à des déformations des enroulements, c’est à dire l’évolution de l’état mécanique permettant d’apprécier la fiabilité escomptée des transformateurs, en terme de susceptibilité accrue à des courts circuits futurs [17]. Un intérêt se manifeste également dans les mesures par FRA pour la détection de tout autre problème conduisant à une modification de la répartition des inductances et des capacités dans les transformateurs, par exemple des défauts sur le noyau ou des défauts de mise à la terre du noyau ou des écrans [17]. Une autre application des mesures par FRA est le contrôle de l’intégrité mécanique d’un transformateur après transport, fournissant un moyen fiable de confirmer que les assemblages du noyau et des enroulements n’ont subi aucune détérioration malgré les secousses répétée en cours de transport [17]. Les mesures par FRA peuvent donner des informations sur la tenue des structures géométriques des enroulements.
Défauts à la masse et influence du régime de neutre
Les défauts entre enroulement HT et la masse ont comme origine la plus fréquente une rupture d’isolement suite à surtension. Toutefois, ils peuvent également être la conséquence de défauts de type mécanique ou de l’évolution d’un défaut électrique comme vu précédemment. Les caractéristiques d’un défaut à la masse, ainsi que les capacités à le diagnostiquer, dépendent du mode de mise à la terre du réseau d’alimentation et de l’emplacement du défaut dans le transformateur. Dans le cas d’un réseau haute tension à neutre relié à la terre par une impédance et non distribué, le défaut fera apparaître un courant à la terre fonction de l’impédance du neutre et de la position du défaut sur l’enroulement. Dans le cas d’un courant de défaut très faible, on retrouve un risque de montée en pression lente comme pour les défauts entre spires. Dans le cas d’un réseau à neutre accordé (mis à la terre par une bobine de Petersen), le défaut d’isolement d’un transformateur immergé va présenter un caractère auto-extincteur récurrent. La faible valeur du courant de défaut permet son extinction spontanée dans l’huile et la réapparition progressive de la tension, caractéristique d’un réseau à neutre accordé, entraîne un claquage quelques centaines de millisecondes plus tard. La fréquence du phénomène va augmenter s’il y a dégradation progressive par les claquages successifs entraînant une baisse de tenue diélectrique. Dans le cas d’un réseau à neutre relié directement à la terre et distribué (réseau à 4 conducteurs), la présence d’un courant de neutre est normale, du fait de l’existence de charges monophasées, et l’apparition d’un défaut va augmenter le courant dans le neutre et ceci en fonction de l’impédance du tronçon d’enroulement non court-circuité.
Conclusion générale
L’étude menée dans ce mémoire, est consacrée à l’analyse de réponse du gain en fréquence des enroulements d’un transformateur de puissance en vue de son diagnostic. Le diagnostic des machine électriques, est science à part entière qui est exploitée dans le domaine du contrôle non destructif des dispositifs électrotechniques, afin de contribuer aux procédures de maintenance et d’entretien entreprises part les techniciens. El existe une panoplie de méthodes de diagnostic des transformateurs cependant celle traitée dans le cadre de ce travail est l’une des plus performantes, souples et récentes, entre autre l’analyse de la réponse en fréquence des enroulements du transformateur. Après l’application de méthode en question, sur un transformateur de puissance utilisée dans les centrales électriques (élévateur) 110/10.5kV-125MVA 50Hz ; on a pu tirer les conclusions suivantes :
•Les défauts de court-circuit entre spires, se manifestent par des pics de résonance dans la place (3kHz-100kHz), et on a constaté le déplacement de ces pics avec le déplacement des défauts le long de l’enroulement.
•Les défauts liés aux ouvertures ou aux coupures de spires de l’enroulement apparaissent comme des perturbations sur la réponse en gain même aux faibles fréquences, ces perturbations sont signifiantes dans la plage de fréquence (1KHz-100kHz)..
•Les défaillances liés aux déformations propres de l’enroulement se manifestent par des pics de résonances dans (100KHz-2MHz).
Introduction générale |