Cours caractéristiques d’un moteur à courant continu, tutoriel & guide de travaux pratiques en pdf.
Rappel théorique sur la commande des moteurs à courant continu (TPN°1 & TPN°2)
Les moteurs à courant continu sont utilisés dans de nombreuses applications industrielles, bien que leur construction soit plus complexe que celle des moteurs à courant alternatif. Les avantages de ces moteurs sont :
- une large gamme de variations de vitesse au-dessus et au-dessous de la vitesse de régime ;
- un fonctionnement avec des couples constants ou variables ;
- une accélération, un freinage et une inversion du sens de rotation très rapide, ce qui est avantageux dans le cas des appareils de levage et des machines outils ;
- une vitesse de rotation qui peut être régulée par l’intermédiaire d’un système de rétroaction ;
- la possibilité de fonctionner comme générateur lors du freinage par récupération d’énergie.
Caractéristiques d’un moteur à courant continu
La vitesse d’un moteur à courant continu est inversement proportionnelle au flux inducteur et directement proportionnelle à la force contre-électromotrice du moteur. Cette relation nous est donnée par L’Equation
N = f.c.e.m KF
Le couple du moteur est proportionnel au flux inducteur et au courant de l’inducteur =KFIA
La puissance mécanique est proportionnelle au couple et à la vitesse du moteur P =0,105CN
On peut faire fonctionner le moteur à couple constant en variant la tension de l’induit. Dans ce cas, la puissance varie en fonction de la vitesse. Si on varie le flux inducteur et si l’on garde la tension de l’induit constante, le couple variera inversement proportionnellement à la vitesse du moteur, et la puissance demeurera constante.
La Figure suivante nous montre la relation entre le couple et la puissance du moteur en fonction de la vitesse.
Dans l’industrie, 90% des applications fonctionnent à couple constant. Ainsi on retrouve le fonctionnement à puissance constante dans les pompes, les machines outils et les systèmes d’enroulement.
Variateur de vitesse à thyristors
Les convertisseurs alternatif- continu sont les variateurs de vitesse les plus répandus pour les moteurs à courant continu, puisqu’ils utilisent directement la tension du réseau. Ils sont monophasés ou triphasés. Les ponts monophasés sont utilisés dans les variateurs de faible puissance (jusqu’à 10kw environ). Ils comprennent soit un pont complet de quatre thyristors ou un pont mixte à deux thyristors et deux diodes. Les ponts triphasés sont employés pour les puissances supérieures à 10kw. On peut choisir un pont complet à six thyristors ou mixte à trois thyristors et trois diodes.
Variateur de vitesse réversible
Un variateur est réversible lorsqu’il permet un changement rapide du sens de marche.
Cela nécessite une commande à quatre quadrants. La figure suivante représente les quatre quadrants dans lesquels un variateur réversible peut fonctionner. La vitesse est indiquée sur l’axe horizontal et le couple, sur l’axe vertical.
REPRÉSENTATION DES QUATRE QUADRANTS DU COUPLE ET DE LA VITESSE
Premier quadrant : Le moteur fonctionne dans le sens direct. Le couple et la vitesse sont positifs.
Deuxième quadrant : Le moteur fonctionne en sens inverse (vitesse négative) et le couple est positif (période de freinage ou récupération)
Troisième quadrant : Le moteur fonctionne en sens inverse et le couple est négatif.
Quatrième quadrant : Le couple est négatif et la vitesse est positive (période de freinage ou récupération).
Déroulement d’un cycle normal
Démarrage dans le sens direct (quadrant 1) ; freinage et récupération (quadrant 4).
Démarrage dans le sens inverse (quadrant 3) ; freinage et récupération (quadrant 2).
Pour réaliser un variateur de vitesse réversible à quatre quadrants, on utilise le montage de la Figure suivante qui est constitué de deux ponts à thyristors.
Régulation de vitesse
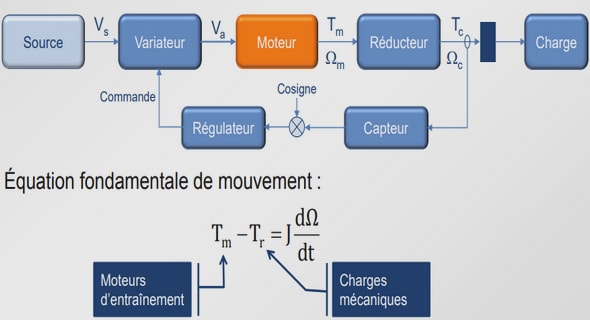
Les variateurs de vitesse permettent non seulement de contrôler la vitesse et d’inverser le sens de rotation, mais aussi d’asservir la vitesse, soit en la maintenant égale à une valeur déterminée, quel que soit le couple résistant exercé sur l’arbre. Le schéma synoptique de la Figure suivante présente les principaux éléments d’un variateur de vitesse pour un moteur c.c à excitation séparée.
Le système comprend
- un module de commande qui est constitué d’un régulateur de vitesse, un circuit d’amorçage à thyristors et des circuits pouvant régler la vitesse de rotation, l’accélération, la décélération, le courant d’induit maximum et le couple maximum. Tous ces réglages peuvent se faire à l’aide de potentiomètres s’il s’agit de carte analogique ou d’un microprocesseur dans le cas de variateur numérique.
- un capteur de vitesse transmettant un signal proportionnel à la vitesse du moteur. Ce capteur est soit une génératrice tachymétrique qui est entraînée par le moteur ou un disque codé, utilisé pour le comptage associé à un convertisseur fréquence-tension.
- un module de commande qui ajuste l’angle d’amorçage des thyristors en fonction de la vitesse du moteur.
On retrouve deux méthodes permettant la régulation de vitesse d’un moteur à courant continu, soit
- par génératrice tachymétrique ;
- par tension d’induit ou f.c.é.m.
Régulation par génératrice tachymétrique
Celle-ci, placée en bout d’arbre du moteur, fournit une tension proportionnelle à la vitesse de rotation.
Le régulateur agit pour que cette tension (la vitesse de rotation) soit égale à la tension de consigne.
Cette méthode permet d’avoir une très grande précision, de 0,1% pour une variation de charge importante. La Figure suivante montre les différents éléments d’une boucle de régulation utilisant une génératrice tachymétrique.