Application à la commande de systèmes robotisés
Présentation Cinq domaines d’application de la vision en robotique vont être abordés. La reconnaissance de caractères imprimés qui représente un cas particulier du tri. Cette technique pourrait prendre de l’importance dans la manutention d’objets car à la différence du code à barre le texte imprimé devient un medium commun aux êtres humains et aux systèmes automatisés. Le contrôle qualité représente le thème majeur des applications industrielles du traitement d’images. Les techniques de contrôle par sondages statistiques peuvent alors être remplace par du contrôle visuel systématique : la garantie de bon fonctionnement de produits complexes exige de satisfaire à des contraintes sévères concernant la qualité des composants employés et de leur assemblage. Enin il est souvent dificile de faire réaliser par des êtres humains des contrôles visuels systématiques qui soient eficaces : la fatigue et la monotonie d’une telle activité voit la qualité des contrôles effectués se dégrader progressivement dans le temps. La vision artiicielle peut être aussi associée à la commande de manipulateurs d’assemblage pour décrire l’environnement dans lequel travaille un manipulateur et permet de contrôler en complément les composants participant à la tâche d’assemblage et le produit inal assemblé. Le contrôle réparti tout le long d’une chaı̂ne de fabrication permet de décomposer en étapes cette tâche et facilite la détection d’outils en panne (bris d’outils) ou alerte sur la dérive des caractéristique de fabrication (contrôle dimensionnel sur des postes d’usinage). Nous aborderons aussi la prise en vrac qui intervient dans l’alimentation en pièces d’une chaı̂ne d’assemblage. Enin en robotique mobile, la vision artiicielle permet de décrire l’univers physique dans lequel un robot évolue, de détecter les obstacles qui surgissent sur son chemin et de planiier ses déplacements pour assurer sa mission. Les chariots mobiles interviennent dans la manutention et le stockage de produits inis.
Lecture de caractères
A peu près toutes les méthodes de reconnaissance de formes s’appliquent avec succès à la reconnaissance de caractères imprimés. Il faut remarquer que ces méthodes peuvent être employées de manière directe ou par apprentissage sur une police de caractères donnée. La variation autour de différents jeux de caractères produit des résultats plus aléatoires. Elle devient alors plus complexe car elle doit tenir compte du contexte et doit être en partie capable d’interpréter le texte lu. Figure 24 : Lecteur de caractères imprimés Robotique et Vision par Ordinateur Page 66 Pour les caractères imprimés ont été appliquées les techniques de reconnaissance suivantes ([5]) : − comparaison avec des masques à position ixes ou variables, − squelettisation, − recherche d’intersections avec des droites, − analyse syntaxique des concavités et des boucles, − approximation polygonale, − analyse topologique, − calcul d’attributs. Par exemple, il a été mis au point à Toulouse un système de lecture de textes imprimés pour aveugles ([6]) : ce système se compose d’une micro-caméra intégrant un système de guidage tactile (cf. igure n°24), d’une unité de traitement à microprocesseur et d’un aficheur tactile de 12 caractères Braille. Le système analyse environ 15 caractères à la seconde selon la méthode de recherche d’intersection avec des droites : le système de guidage tactile permet au non-voyant de suivre et de guider la caméra le long du texte. Le taux d’erreur de lecture est de 5 % , mais le système s’adapte relativement bien à une large gamme de polices de caractères.
Contrôle qualité
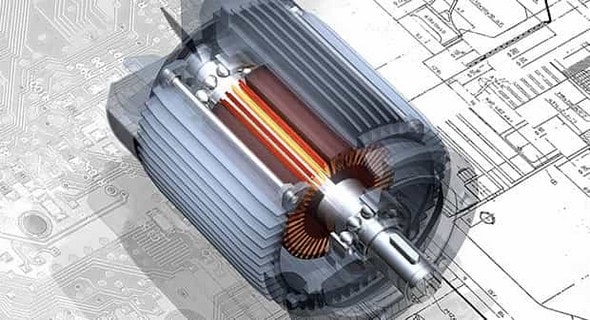
Bien que ce soit le principal domaine dans lequel sont employées les techniques de traitement d’images, il n’existe pas de méthode générale pour l’appréhender et d’outils universels pour le traiter : si l’on dispose de techniques d’analyse de formes géométriques et des couleurs, on est moins bien armé pour prendre en compte la texture des objets (analyse de l’état de surface) en inspection. Dans le domaine de l’inspection de parties mécaniques, l’orientation générale est donnée par l’étude ([7]) que des chercheurs de l’ENSIEG ont fait pour le compte de la société Télémécanique. Cette approche mixte des méthodes statistiques globales et structurelles locales(cf. igure n°25) : − d’une part, l’approche globale est menée pour identiier et localiser l’objet dans la scène ; − d’autre part, l’approche locale permet de vériier la forme de l’objet et de ses diverses parties en comparaison avec un modèle. Robotique et Vision par Ordinateur Page 67 Figure 25 : Inspection par approche mixte L’approche globale repose sur le calcul des moments généralisés , l’approche locale sur la décomposition des frontières en chaı̂nes de sommets convexes et concaves (primitives). Les modèles de représentation utilisables sont soit l’arbre des concavités de l’objet, soit un modèle syntaxique des chaı̂nes convexes/concaves de l’objet. Le temps de réponse pour une inspection évolue entre 2 et 4 secondes sur un système à base de LSI 11. Cette approche fait suite à des travaux similaires effectués au Japon sur des carters de moteurs, mais beaucoup plus ambitieux ([8]) : notamment la texture y est modélisée par polarogramme (cf. igure n° 26). Le système génère des structures très complexes qu’il analyse selon l’approche de prédiction et vériication d’hypothèses : les temps de réponse sont de 90 secondes pour le sujet présenté en image. Ces deux approches montrent le niveau de complexité que peut atteindre une tâche d’inspection portant sur des pièces mécaniques..