Étude expérimentale de la génération de structures
linéaires et non-linéaires
Cas des modes verticaux
Mode unique dans une stratication uniforme
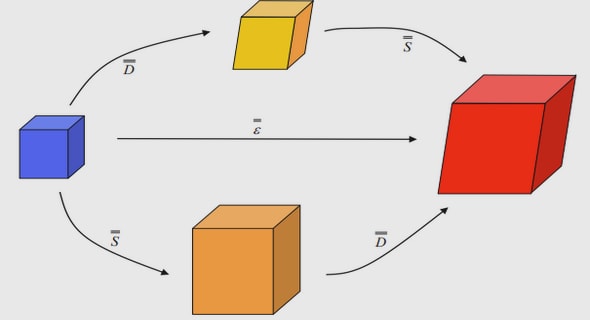
On suppose tout d’abord qu’un mode unique (mode-n) se propage. Si l’on prend en compte les équations (2.8) et (2.9), on trouve le même résultat que pour un paquet d’ondes planes se propageant dans une direction unique, à savoir que les jacobiens s’annulent : on a donc une solution du problème non-linéaire. On peut également essayer de raisonner par analogie avec les ondes planes. Si on considère l’équivalence entre un mode et deux ondes planes à la même fréquence mais avec des vecteurs d’ondes symétriques par rapport à l’horizontale comme montré précédemment, alors on peut considérer l’interaction entre deux ondes vériant ω2 = ω1 et −→k2 = (k1,x, −k1,z). Dans le cas où ω1 est inférieur à N/2, seule l’harmonique à la pulsation ω3 = 2ω1 pourrait se propager, mais elle correspond à un vecteur d’onde −→k3 = (2k1,x, 0) qui n’est pas un mode puisque k3,z = 0. Au nal, via l’interprétation d’un mode en terme d’ondes planes et l’utilisation des règles de sélection de la table 2.1, on retrouve bien le fait qu’un mode unique est solution du problème non-linéaire
Techniques d’observation et outils d’analyse des ondes internes au laboratoire
Nous présentons ici les techniques expérimentales utilisées au laboratoire de l’ENS Lyon ainsi que d’autres techniques rencontrées au cours de collaborations, à la plateforme Coriolis, au laboratoire du M.I.T où j’ai fait deux séjours de quelques semaines, et à bord du Pelagia. An de pouvoir observer et traiter les champs d’ondes internes, des outils d’analyse ont été développés au cours de cette thèse, ou bien encore adaptés lorsqu’ils existaient déjà.
Obtenir un flfluide stratifié
An de pouvoir étudier des ondes internes de gravité, il est nécessaire de pouvoir générer de façon reproductible et systématique un fluide stratifié. Selon la stratication désirée, deux techniques ont été utilisées et nous les présentons ici. A titre indicatif, deux types de cuve sont utilisés pour les expériences réalisées à Lyon ; la cuve n◦ 1 pour les expériences avec le générateur d’ondes, et la cuve n◦ 2 pour les expériences sur le phénomène d’eaux mortes. Leurs dimensions respectives sont rappelées dans la table 3.1. Il est possible d’emboiter plusieurs exemplaires (3 au total) de la cuve n ◦ 1, an d’obtenir un canal plus long. Techniques de remplissage : Le remplissage d’une cuve avec un fluide stratifié est une opération classique [27, 100] et la méthode, dite « méthode des deux bacs », a été généralisée récemment pour créer tout type de prol [50]. Le principe est illustré à la gure 3.1 (a). Le bac de stockage correspond à l’eau salée (la plus dense) et le bac de mélange est initialement remplie d’eau douce (la plus légère). Nous avons appliqué cette méthode illustrée grâce à deux pompes péristaltiques Cole-Parmer c . Nos cuves étant de section constante, le choix du débit Q2(t) = 2Q1(t) =cste permet d’obtenir une évolution linéaire de la densité avec la profondeur. La stratication obtenue est alors très stable, et permet de réaliser des expériences sur plusieurs jours voire plusieurs semaines. Dans le cas où l’on souhaite réaliser un fluide constitué de plusieurs couches homogènes, il est plus simple de remplir ces couches les unes après les autres. Pour cela, on utilise un otteur sur lequel est placé un tuyau relié au volume d’eau à la densité souhaitée, et on laisse agir la gravité. Il est important que le fluide s’écoulant à la surface du otteur atteigne la surface libre avec la vitesse verticale la plus faible possible, pour minimiser le mélange avec la couche précédente. Mesure de la stratication : Le contrôle du prol de densité peut se faire de deux façons ; par l’observation des faisceaux d’ondes internes à une fréquence donnée (dans le cas où N(z) varie peu), ou par la mesure directe du prol de densité.
OBSERVER LES ONDES INTERNES
La deuxième méthode est rendue possible grâce à la présence de seringues de prélèvement sur le coté de la cuve n◦ 1, espacées tous les centimètres, et grâce à un densimètre de la marque Anton Paar c . Le principe d’utilisation du densimètre est simple : une pompe de prélèvement permet d’introduire le fluide à peser dans un capillaire, qui est excité et dont la fréquence de vibration dépend de sa masse. L’appareil permet de mesurer la masse volumique d’un fluide entre 0 et 2 g.cm−3 avec une précision de 5.10−4 g.cm−3 à partir d’un échantillon de 2 mL. La mesure est donc non-intrusive, perturbe très peu la stratication (2 mL prélevé pour 50 L de fluide stratifié), et est directe. Un exemple de prol quasi-linéaire mesuré avec cette méthode est présenté à la gure 3.1 (b). Pour les dernières expériences réalisées au cours de la thèse, une sonde conductimétrique et de température (thermocouple) de la marque PME c a été utilisée. Cet instrument, bien qu’intrusif, est monté sur une longue tige très ne qui déplace très peu de fluide. La taille de la zone active de mesure étant très petite (quelques microns) et la mesure pouvant se faire en continu, la sonde permet de réaliser un prol de densité du fluide stratifié en la déplaçant à travers la stratication à l’aide d’un axe motorisé. Plusieurs exemples seront présentés à travers les diérents chapitres.
Observer les ondes internes
Strioscopie synthétique
Principe de la technique L’observation des ondes internes est possible grâce au fait que l’indice de l’eau est fonction de sa masse volumique. Ainsi, le gradient de concentration en sel entraine un gradient de masse volumique et donc un gradient d’indice. Qui plus est, sur la gamme de valeurs rencontrées, on peut supposer la variation linéaire, d’où : n = a + b.ρ , avec dρ dn = 4.1 g cm−3 . (3.1) La technique de strioscopie synthétique, « synthetic schlieren technique » en anglais, est sensible aux variations d’indice. Introduite par Dalziel et al [17], elle permet de quantier les gradients d’indice optique dans les écoulements bidimensionnels. La gure 3.2 décrit le principe. L’image du motif obtenu par la caméra à travers le fluide à l’équilibre sert de référence. Il s’agit d’un nuage de points répartis aléatoirement, et de densité susante pour que le damage du plan soit le plus n possible. Quelques pixels par points est susant, mais la grille dépend de la résolution spatiale choisie pour la caméra. Figure 3.2 (a) Origine de la déviation d’un rayon lumineux traversant un fluide stratifié, et (b) principe de la technique de strioscopie synthétique. Les rayons lumineux traversant la cuve sont déviés d’un angle α fonction des gradients locaux : tan α = p tan2 αx + tan2 αz avec αx = L n ∂n ∂x, αz = L n ∂n ∂z . (3.2) Pour chaque point du motif de référence, cette déviation se traduit par un déplacement de l’image de ce point de quelques pixels ∆p sur la caméra. Si on raisonne sur une des directions (x ou z) : ∆px = αxf r , (3.3) où r est la dimension d’un pixel en cm, f la focale de la caméra que l’on peut relier à la résolution de la résolution de la caméra en pixels/cm γ via γ = f/rd. Ainsi, on a ∆px = αxγd ⇒ ∂ρ ∂x = n L dρ dn ∆px γd . (3.4) On peut convertir cette variation en pixels en unité adaptée ; la plus pratique est en variation de pulsation de Brunt-Väisälä ∆N 2 = g ρ n L dρ dn ∆p γd en (rad.s−1 ) 2 . (3.5) Au nal, il sut de connaître l’indice et la densité moyenne pour chaque remplissage, ainsi que la résolution choisie pour connaître les variations horizontales ou verticales de la pulsation (les paramètres L, d, et g sont constants). 3.2.1.2 Imperfection des mesures La technique de strioscopie synthétique présente certaines limitations qu’il est important de rappeler. Il faut remarquer que dans le cadre des expériences, des variations d’indice de l’air contribuent à la modication du chemin optique entre le motif et la caméra. Il est dicile de s’aranchir des uctuations thermiques et du brassage naturel de l’air de la pièce, cela constitue la source de bruit la plus gênante. La déviation standard des déplacements générés sont de l’ordre de 0.03 à 0.1 pix (selon les conditions climatiques). Il est cependant possible de diminuer au maximum cette contribution de plusieurs façons. Tout d’abord, il est possible d’essayer de minimiser l’amplitude du bruit généré. La source lumineuse utilisée a été choisie de façon à minimiser l’émission d’infra-rouges. En remplaçant les lampes de bureau (éclairage puissant, directif, chauant fortement l’air) par un panneau lumineux 1 de dimensions 17″ x 24″, orant un éclairage homogène sur toute la surface du motif et générant très peu de chaleur. Une seconde amélioration peut être apportée en minimisant les mouvements de l’air dans la pièce via une isolation soigneuse de la salle où sont réalisées les expériences, et la mise en place d’un caisson d’isolement de l’air entre la cuve et la caméra. La plus forte contribution étant due à l’air le plus proche de la caméra, ce caisson peut se limiter à l’environnement proche de la caméra. Par ailleurs, il peut être intéressant d’augmenter l’amplitude du signal observé pour un même niveau de bruit (i.e. pour une même température). La sensibilité du montage ainsi que l’optimisation de la géométrie du dispositif utilisée a déjà été étudiée [17, 40]. L’inuence de la distance motif-cuve ainsi que celle de la distance cuve-caméra est telle qu’on peut optimiser les déplacements apparents des points du motif sans que la distance totale ne joue de rôle majeur. Cette démarche n’est cependant pas générale et dépend de l’expérience considérée via la taille du motif observé, la nesse du motif, la structure des ondes, etc. Un exemple de conguration utilisée est une distance totale caméra-motif de 3.2 m, avec D = 0.4 m et d = 2.8 m (cf. gure 3.2), avec une distance focale de la caméra typiquement de l’ordre de 7 cm. On peut également remarquer que les uctuations de densité dûes aux ondes sont proportionnelles au gradient moyen de densité (∝ N2 , cf. equation (2.10) ou encore (2.32c)). L’amplitude du signal mesuré ∆p est donc directement proportionnelle à la pulsation de Brunt-Väisälä de la stratication mise en place, alors que le niveau de bruit reste constant. Il est possible d’utiliser ce moyen an d’augmenter le rapport signal sur bruit des mesures. Cependant, nous n’avons pas systématiquement adopté cette démarche car il est dicile d’augmenter considérablement la valeur de N. Les autres sources de bruit sont d’éventuelles modications non-souhaitées de la conguration de l’expérience (vibration du support de la caméra, de la cuve ou de la grille de point) ou encore les bruits électroniques du système d’acquisition d’images. Elles restent en général négligeables devant la première source présentée. 1. l’éclairage basse tension est obtenu à partir d’un n tapis de matériau semi-conducteur. Produit de la marque Electric Vynil c . 38 CHAPITRE 3. TECHNIQUES ET OUTILS 3.2.1.3 Calculs de corrélation L’aboutissement de la mesure nécessite l’utilisation d’un algorithme de corrélation d’images an de calculer l’ensemble des déplacements (verticaux et horizontaux) du motif et d’obtenir un champ bi-dimensionnel correspondant aux ondes internes observées. Nous utilisons pour cela les logiciels du projet CIVx développé à la plateforme d’expérimentation Coriolis (à Grenoble) [105, 26]. Le principe est simple et basé sur un calcul de corrélations entre une image de référence (cf. section 3.2.1.4) et une image dans un état perturbé. De façon similaire à un algorithme de PIV, il s’agit d’un algorithme de « Correlation Image Velocimetry » qui donne comme information nale le champ de déplacement des points entre 2 images. La résolution obtenue permet de détecter des déplacements inférieurs au dixième de pixel. On obtient donc les champs de déformation horizontaux et verticaux, U(x, z, ti) et V (x, z, ti), où {ti , i ∈ {1, …, N}} sont les temps d’échantillonnage, entre deux images. Un exemple est illustré à la gure 3.3 où l’on a superposé le champ V sur la deuxième image ayant servie au calcul, la première image correspondant à la même image au repos (absence d’ondes dans la cuve).
1 Introduction |