Le système informatique est composé de deux sous-systèmes :
• le sous-système du robot ;
• le sous-système du poste de télépilotage.
D’où l’idée de faire deux diagrammes de cas d’utilisation – un par sous-système – et de placer chaque diagramme dans un paquetage. La figure 1.24 montre deux paquetages : un pour le sous-système du robot et un pour le sous-système du poste de pilotage. La relation de dépendance entre les paquetages signifie que le système de pilotage utilise le robot.

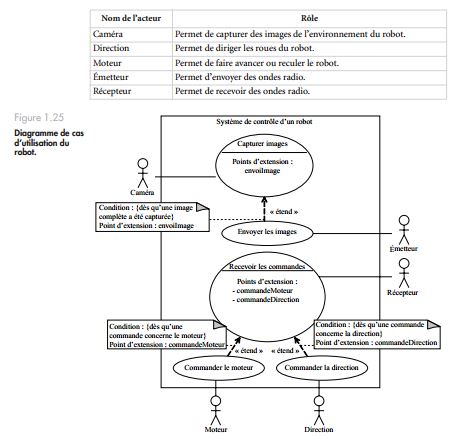
Commençons par modéliser le robot. Ses capteurs (caméra, moteur et roues) sont à l’extérieur du système informatique et ils interagissent avec lui. Ils correspondent a priori à la définition d’acteurs. Reprenons chaque capteur pour l’étudier en détail :
• Le système doit demander la capture d’une image à la caméra et réaliser la capture. La caméra est donc un acteur associé à un cas d’utilisation appelé « Capturer images » (figure 1.25).
• Le sens de rotation du moteur peut être commandé. Le moteur est l’acteur ; il est associé à un cas appelé « Commander le moteur ».
• La direction des roues peut être modifiée, d’où la création du cas d’utilisation « Commander la direction » relié à l’acteur Direction.
Pour pouvoir envoyer les images au poste de pilotage et recevoir les commandes en retour, il faut un capteur supplémentaire, émetteur/récepteur d’ondes radio. Le système informatique ne va pas se charger d’envoyer et de recevoir des ondes radio – c’est le rôle des périphériques d’émission et de réception – mais il doit s’occuper du transcodage des images pour les envoyer via des ondes. Le système informatique doit-il réaliser lui-même ce transcodage ou bien les fonctions de transcodage sont-elles fournies avec les périphériques ? Pour répondre à cette question, il faudrait réaliser une étude de marché des émetteurs/récepteurs radio. Cela dépasse le cadre de cet ouvrage. Considérons que le système informatique inter- vient, ne serait-ce que pour appeler des fonctions de transcodage. Cela constitue un cas d’utilisation. Deux flots d’informations distincts doivent être envoyés au poste de pilotage : des images et des commandes. Cette dernière remarque incite à créer deux cas d’utilisation : un pour émettre des images (« Envoyer les images ») et un pour recevoir les commandes (« Recevoir les commandes »). En outre, selon l’utilisation du robot, la transmission des images s’effectue plus ou moins vite : si les déplacements du robot sont rapides par exemple, la transmission doit l’être aussi. Ces contraintes de réalisation font partie des spécifications techniques du système. Elles doivent figurer dans la description textuelle du cas d’utilisation. Sur le diagramme de cas d’utilisation, il est possible de placer une relation d’extension entre les cas « Envoyer les images » et « Capturer images », en indiquant comme point d’extension à quel moment de la capture et à quelle fréquence sont envoyées les images.
Intéressons-nous à présent au sous-système de pilotage. La figure présente le diagramme de cas d’utilisation, qui se déduit sans problème du diagramme précédent.