Modélisation des vibrations d’origine ferroviaire transmises aux bâtiments par le sol
Procédure de calcul des mobilités
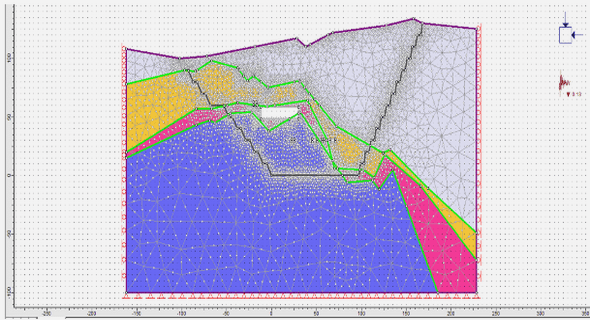
Compte tenu des trois types de fondations choisis, et de la coupure choisie pour la décomposition en sous-structures, il est nécessaire de représenter un domaine hétérogène comportant la fondation d’une part et le sol environnant d’autre part. La méthode numérique choisie est une méthode mixte (FE-BE) couplant Éléments Finis (ou Finite Element, FE) et Éléments de Frontière (ou Boundary Element BE). Le code utilisé, développé au CSTB par Jean, est dénommé Mefissto [25, 26]. Le tenseur de Green choisi dans la méthode ne permet pas de prendre en compte la surface libre et le maillage d’éléments de frontière doit donc comporter une représentation de la surface libre du sol en complément de l’interface sol-fondation, la fondation étant représentée elle-même par éléments finis.
CALCUL DES MOBILITÉS
Le maillage de la surface libre doit être suffisamment étendu de part et d’autre de l’ouvrage pour représenter convenablement une surface de sol supposée infinie. La méthode peut également permettre de représenter une stratification à condition de mailler par éléments de frontière les couches de sol stratifiées. À l’interface entre les deux domaines, la continuité des vitesses et la conservation des efforts permettent d’assurer le couplage. L’ensemble des calculs est effectué dans l’espace de Fourier, fréquence par fréquence. Les mobilités sont déterminées en appliquant différents types d’efforts sur la zone de contact. FIGURE II.2 – Illustration de l’excitation verticale d’une fondation pour le calcul de sa Mobilité. Plus de détails sur le code Mefissto sont donnés dans l’Annexe C qui lui est consacrée. Les mobilités sont déterminées par un nombre de simulations égal au nombre de degrés de liberté. Les forces nodales appliquées sont identiques sur toute la zone de contact et leur somme est égale à l’unité, pour les efforts horizontaux et verticaux. La mobilité nécessite également d’appliquer un moment sur la zone de contact, qui est obtenu en appliquant une répartition linéaire de forces nodales, le moment résultant étant unitaire. En toute rigueur, il faudrait assurer que la zone de contact se comporte rigidement. Toutefois, il a été vérifié que la zone de contact se comporte bien de cette façon, en raison de la rigidité importante du béton de structure, comme indiqué dans la sous-section II.2.3. Les composantes des vitesses sur ces mêmes nœuds sont alors recueillies pour donner les Nddl composantes de la mobilité générées par l’excitation étudiée. Dans cet espace à deux dimensions le nombre de degrés de liberté est trois : deux translations et une rotation dans le plan. Le nombre de simulation à effectuer est égal, dans la procédure utilisée, au nombre de distributions de forces différentes qu’il faut considérer, soit exactement le même nombre que celui des degrés de liberté de toutes les zones de contact. Des schémas illustratifs de ces calculs pour les composantes déduites d’une force transverse (F) et d’un moment (M) sont donnés sur la Figure II.3. La Figure II.2 illustre une excitation longitudinale (L). Dans ce document, la majorité des calculs sont en deux dimensions. Néanmoins, les ondes en provenance de la source se propagent également dans la direction parallèle à la voie et en vue d’évaluer cet effet, certains cas ont été traités en 2.5D à l’aide du même logiciel (voir l’annexe C.2). Dans cette représentation le nombre de degrés de liberté accessibles est, comme en trois dimensions, de six : trois translations et trois rotations. Pour bien définir la matrice des mobilités, il convient de noter que celle-ci se décompose en sous-matrices carrées relatives aux zones de contact, i.e. aux différentes fondations. Ces sous-matrices sont composées de N2 ddl termes donnant le rapport entre une composante de la vitesse résultante (ici, pour le cas 2D vx, vy ou vα) et une force appliquée sur un degré de 42 CHAPITRE II : Système Source, Mobilités – Vitesses Libres – Calibration liberté (L, F ou M). Y ij = Y ij Lx Y ij Ly Y ij Lα Y ij F x Y ij F y Y ij F α Y ij Mx Y ij M y Y ij Mα (II.5) où i est l’indice du point où est appliquée la force d’excitation et j l’indice du point d’observation de la vitesse. FIGURE II.3 – Schéma illustratif de l’obtention des composantes de la mobilité données par une excitation verticale (A) et un moment (B) des fondations sur semelles. Lorsque toutes les fondations ont été caractérisées, toutes les sous-matrices Y ij sont connues et la matrice complète s’écrit : Y = Y 11 Y 12 Y 21 Y 22 (II.6) Dans le cas à deux fondations où celles-ci sont identiques, la symétrie du problème permet de réduire le nombre de simulations. C’est le cas dans l’exemple présenté sur la Figure II.3 où l’on peut remarquer que Y 11 = Y 22 et Y 12 = Y 21 .
Vérifications
Il est important de vérifier que chaque zone de contact se comporte de façon rigide car si ce n’était pas le cas, il serait nécessaire de considérer chaque point du maillage de la zone de contact comme un degré de liberté, ce qui augmenterait de façon importante les dimensions de la matrice de mobilité et limiterait donc fortement l’intérêt de la méthode. Pour s’en assurer, deux vérifications complémentaires sont données sur les deux figures qui suivent. La première représente les longueurs d’ondes relatives aux principales ondes présentes dans le sol et la fondation. Celles-ci sont les ondes de compression, de cisaillement et de Rayleigh dans le sol ainsi que les ondes de compression, de cisaillement, de torsion et de flexion dans une plaque ou une poutre. Elles ont été déterminées à partir de leurs célérités, dont les expressions sont accessibles dans la littérature [79, 75], et résumées dans le tableau II.3. Les symboles (λ, µ) représentent les constantes de Lamé et (E, ν) le module d’Young et le coefficient de Poisson, ρ est la masse volumique, h l’épaisseur de la plaque ou de la poutre, ω la pulsation et cT la célérité des ondes transverses. Les longueurs d’ondes sont déduites du rapport de la célérité concernée et de la fréquence Λi = ci/f. Elles sont tracées sur la Figure II.4 avec les valeurs suivantes Esol = 200e6P a, ρsol = 1600g/m3 , νsol = 0.257, Ebat = 26e9P a, ρbat = 2400g/m3 , νbat = 0.3 et h = 0.2m. FIGURE II.4 – Longueurs d’ondes rencontrées dans les différentes zones du problème On observe que, quel que soit le type d’onde, les longueurs mises en jeu sont bien supérieures aux dimensions de la surface de la zone de contact dont la dimension est de l’ordre de quelques dizaines de centimètres, même dans le cas du radier où les zones de contact sont placées au bas des voiles verticaux. Plus directement, il est possible de vérifier que la zone de contact subit un déplacement de corps rigide, quels que soient les efforts appliqués (Force verticale, Force horizontale, Moment), autrement dit que la zone de contact reste plane. Pour ce faire, la Figure II.5 montre la zone déformée dans les différents cas étudiés pour un sol moyen. FIGURE II.5 – Déformées des surfaces des fondations lors de l’application des distributions de forces à 100Hz. Il est donc possible de vérifier directement sur cette figure que les sections planes restent planes. Une troisième vérification peut s’effectuer sur la symétrie des mobilités. Comme le prescrit le principe de réciprocité de Rayleigh [88] les mouvements générés sur un ddl par une force appliquée sur un deuxième ddl doivent être identiques à ceux générés sur le deuxième ddl par une force appliquée sur le premier ddl. Cette observation est simple à effectuer : il suffit de tracer simultanément les composantes symétriquement opposées par rapport à la diagonale de la mobilité en fonction de la fréquence. Dans cette optique, les trois ensembles de courbes de la Figure II.6 représentent certaines des composantes mentionnées pour les trois types de fondations présentés dans le paragraphe précédent.
CALCUL DES MOBILITÉS
Symétrie des trois types de fondations supportées par un sol moyen Avec les courbes présentées, seules les sous-matrices Y 11 et Y sont affichées car, par construction du maillage, les égalités suivantes sont toujours respectées : Y 11 = Y 22 et Y 12 = Y 21. À l’exception de certaines parties imaginaires, les mobilités sont superposées et la symétrie est bien respectée.
Mobilités 2D
La réponse d’une fondation dépend des caractéristiques du sol, de sa forme et de la présence d’autres fondations à proximité. Dans ce paragraphe, nous verrons les trois formes distinctes, le radier, la fondation sur semelle et le caisson. Pour chacune de ces configurations, nous observons les tendances des composantes de leurs mobilités d’entrées et de transferts lorsqu’elles reposent sur un sol de caractéristiques moyennes. FIGURE II.7 – Mobilités d’entrée et de transfert des trois types de fondations supportées par un sol homogène moyen. Les six ensembles de courbes du haut représentent les mobilités d’entrées, soit respectivement du premier au troisième les termes diagonaux de la matrice de mobilité correspondant de bas en haut à des efforts verticaux, des efforts horizontaux et des moments appliqués au même point. On peut noter que le degré de liberté le plus sensible n’est pas le même pour tous les types de fondation. Pour le radier, le mouvement vertical est nettement supérieur au mouvement horizontal alors que pour les deux autres c’est le degré de liberté horizontal qui est le plus sensible. Sur les six ensembles de courbes situés dans la zone inférieure de la Figure II.7, ce sont les mobilités de transferts qui sont visibles. Pour celles-ci, la prépondérance des mouvements horizontaux ou verticaux a la même tendance que pour les mobilités d’entrées. En revanche, la rotation est ici plus forte pour le caisson que pour le radier. Parallèlement à ces observations, il est intéressant d’évaluer l’importance relative des mobilités de transfert. Ces composantes traduisent l’importance de la corrélation entre les deux zones de contact. Afin d’obtenir un indicateur sur l’importance des termes de transfert, nous proposons d’observer le rapport mobilité de transfert sur mobilité d’entrée dans les différents cas (Figure II.8). D’après ces courbes les composantes de transferts ont, au moins pour l’un des trois degrés de liberté observés, une importance significative. Il est donc souhaitable de conserver ces composantes dans les trois situations décrites ici.
Mobilités 2.5D
Les calculs 2D présentés précédemment correspondent à un déplacement plan (dans le plan (x, y)), c’est-à-dire un déplacement simultané de tous les points d’une fondation (supposée infinie) situés sur une même droite perpendiculaire au plan (x, y). Comme on le verra par la suite, ce calcul est bien adapté pour des sources constituées d’une ligne de forces parallèle à l’axe Oz agissant toutes en phase. Si l’on veut représenter la réponse de la même fondation à une force ponctuelle harmonique située en surface du sol, ou a une ligne de sources de longueur finie suivant l’axe 0z, il est indispensable de prendre en compte la propagation des ondes dans la direction z. C’est l’objet du calcul 2.5D. En pratique, la mobilité est déterminée en appliquant au problème étudié une transformée de Fourier spatiale pour la variable z, ce qui revient à résoudre le problème pour chaque nombre d’onde, noté kz. L’application de la transformée de Fourier inverse permet d’obtenir alors le déplacement dans l’espace réel (voir Annexe C.2 Mefissto 2.5D). Principe de la simulation numérique Il a été vu précédemment que le calcul 2D de la mobilité est réalisé en décrivant la zone de la fondation par des éléments finis, l’interface avec le sol étant définie par éléments de frontière. Pour le cas 2.5D, il serait nécessaire de remplacer les éléments finis par des éléments finis spectraux qui ne sont pas présents dans le code Mefissto. Dans ce cas, il est toutefois possible de contourner la difficulté en représentant le domaine correspondant à la fondation par des éléments de frontière. Comme précédemment, pour déterminer les termes de mobilité relatifs à une zone de contact, il convient d’appliquer une distribution de forces sur la zone de contact. Une autre difficulté apparaît car la zone de contact de la fondation est a priori infinie dans la direction z et une force appliquée dans le plan z = 0 par exemple induit des déplacements variant avec z. Pour prendre en compte l’interaction entre les zones de la fondation situées à des distances z différentes, il a été mis en place une approximation reposant sur le découpage de la fondation en zones S1, S2, …Sn de même largeur comme indiqué en Figure II.9. FIGURE II.9 – Représentation des zones de contact d’une fondation en 2.5D. Il est alors possible d’appliquer une répartition d’efforts sur chaque zone Si et de déterminer les vitesses induites sur la zone Sj . Ces déplacements sont obtenus en fonction de kz et le retour dans l’espace réel est alors obtenu par : vi(x, y, z) = Z +∞ −∞ vˆi(x, y, kz)e kzz dkz (II.7) où i peut prendre les valeurs x, y ou z. Les rotations sont obtenues à partir de considérations géométriques sur les composantes des translations. Dans l’exemple qui suit, nous identifions deux points dans l’état initial du maillage, A et B, et nous observons leurs déplacements après application de l’excitation. Leurs nouvelles positions sont notées A0 et B0 . Ces déplacements sont, puisque le modèle est harmonique, obtenus en divisant les vitesses par ω. La rotation est donnée par l’angle que forme le segment AB avec le segment A0B0 (Figure II.10) et la vitesse de rotation est le produit de cet angle par la pulsation. L’angle recherché est indiqué par l’indice de l’axe autour duquel le segment pivote. Par exemple, d’après les relations trigonométriques usuelles, l’angle αz est donné par la relation suivante : αz = arctan YAA0 − YBB0 ∆X + XAA0 − XBB0 Ceci nous amène à définir les vitesses de rotation à partir des vitesses en deux points du maillage, n et n − 1, par les relations qui suivent : α˙x = ω arctan v n y − v n−1 y ω∆z + v n z − v n−1 z (II.8) α˙y = ω arctan v n x − v n−1 x ω∆z + v n z − v n−1 z (II.9) α˙z = ω arctan v n y − v n−1 y ω∆x + v n x − v n−1 x (II.10) Remarquons au passage que les vitesses, de l’ordre de 10−6m/s, sont toujours bien inférieures aux termes ω∆z et ω∆x qui représentent le produit de la distance entre deux points du maillage et la pulsation. Celui-ci est typiquement de l’ordre de 10−22πf où f est la fréquence comprise entre 10 et 250Hz. Les définitions précédentes peuvent se simplifier grâce au développement limité de la fonction arctan au premier ordre, qui n’est autre que l’argument de cette fonction. Les composantes créées par un moment sont, dans les cas des moments Mz et My, obtenues directement par une simulation où le moment est appliqué de façon similaire au cas en deux dimensions. Pour les composantes générées par un moment Mx autour de l’axe x sont déduites par la superposition des vitesses résultantes d’une distribution de forces ponctuelles sur la surface de la fondation, selon la relation suivante : vi(x, y, z) = Z +∞ −∞ N Xz/2 l=−Nz/2 WM lvˆi(x, y, kz)e kz(z+lδz) dkz où l’indice i peut prendre les valeurs x, y ou z et WM est une fonction de pondération à prendre en compte sur les forces appliquées pour générer le moment Mx. La relation précédente peut se mettre sous la forme : vi(x, y, z) = N Xz/2 l=−Nz/2 WM l Z +∞ −∞ vˆi(x, y, kz)e kz(z+lδz) dkz (II.11) qui permet de calculer ces vitesses. La réponse à une force ponctuelle appliquée sur un z donné étant connue, cette relation correspond donc à un post-traitement des résultats. Pour la composante de la mobilité YMxαx , une difficulté supplémentaire apparaît. Selon la relation (II.10), il faut quantifier l’effet du moment en des points situés à une distance δz du plan z = 0. Pour cela, la relation précédente est légèrement modifiée et prend en compte le changement de position : vi(x, y, z + δz) = N Xz/2 l=−Nz/2 WM l Z +∞ −∞ vˆi(x, y, kz)e kz(z+δz+lδz) dkz (II.12) La rotation est finalement obtenue par la relation (II.10) où les vitesses v n i et v n−1 i sont donnée par les situations (A) et (B) de la Figure II.11. FIGURE II.11 – Représentation des distances Force-Vitesse à prendre en compte pour les vitesses induites par un moment Mx selon la distance entre le plan z = 0 et le point considéré. Une description détaillée de toute cette procédure fait l’objet du deuxième paragraphe de l’Annexe C.
CALCUL DES MOBILITÉS
Observation de la “mobilité » dans le plan fréquence-nombre d’onde Un résultat intéressant est l’observation de résultats intermédiaires en fonction du nombre d’onde kz. Ayant appliqué les efforts sur la zone S0 centrée sur l’axe Ox en fonction de kz, il est possible de déterminer la moyenne des vitesses observées dans cette zone en fonction de x, y, kz pour chaque fréquence d’excitation. On peut alors représenter ce rapport dans le plan d’onde-fréquences (kz, f). Ce résultat est reporté Figure II.12 pour les parties réelles des seules composantes d’entrée relatives aux degrés de liberté portés par x et y.
Introduction |