- Sunday
- May 5th, 2024
- Ajouter un cours
MODELE DYNAMIQUE DES SYSTEMES ARTICULES Introduction Jusqu'à présent, notre analyse des systèmes articulés était uniquement focalisée sur des considérations cinématiques. Dans ce chapitre, nous présentons les causes qui sont à l'origine du mouvement de tels mécanismes. Les buts que nous...

NOTION DE COUCHE LIMITE Introduction L’étude des fluides a apporté sa contribution dans l’amélioration de la vie quotidienne. L’humanité, dans son existence, a été toujours tributaire des fluides, pour sa survie et pour son confort. Des disciplines telles que :...
MODELISATIONS DE PLAQUES SANDWICHS Synthèse bibliographique L'introduction des composites sandwichs dans la plupart des secteurs d'activités a conduit les chercheurs à développer des théories de plaques sandwichs, dédiées à l'analyse et à la prévision de leur comportement et de leur...
MODELISATION MULTIPARTICULATE DES MATERIAUX MULTICOUCHES CONSTRUCTION DU MODÈLE MULTIPARTICULAIRE DES MATERIAUX MULTICOUCHES (M4) Premier niveau de construction: Définition de la géométrie et de la cinématique a) Famille géométrique de l'objet On peut décrire généralement l'objet à modéliser par une variété...
Modélisation du comportement mécanique Eléments de mécanique des milieux continus Cinématique des grandes transformations L’espace euclidien tridimensionnel est muni d’un repère cartésien fixe d’origine O et de vecteurs de base (e1 , e2 , e3 ). On considère un corps...
MODELISATION DE LA PROPAGATION QUASI-STATIQUE DE FISSURES Critères d’amorçage Ces critères permettent de déterminer à quel moment et à quel endroit la fissure va s’amorcer. Ils sont généralement basés sur une comparaison des paramètres de fissuration (K, G, J, …)...

Modélisation d’une poutre fléchie multi-renforcée Les essais du chapitre précédent montrent que la présence du plat carbone répartit mieux les efforts dans la lame inférieure, tendant ainsi à diminuer l’impact des défauts les plus importants qui sont les maillons faibles...
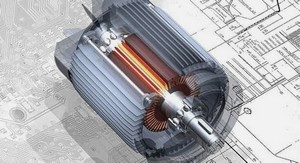
Contribution à l’analyse de stabilité orientée tâche pour la préhension robotique Organe terminal d’un robot manipulateur Les organes terminaux des robots sont des outils positionnables au bout des bras robotiques industriels et qui leur permettent d’interagir avec leur environnement pour...
Étude du comportement post-coulée de réfractaires électrofondus à Très Haute Teneure en Zircone (THTZ) Modèles numériques de plasticité de transformation Dans ce paragraphe, nous allons nous intéresser aux travaux réalisés sur la plasticité de transformation induite par la transformation martensitique...
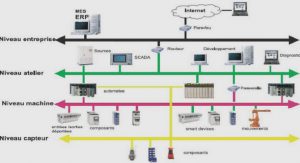
Télécharger le fichier original (Mémoire de fin d'études) ÉTAT DE L’ART Une des solutions des industriels pour améliorer leurs processus est de combiner les com-pétences humaines avec les processus d’automatisation. Cela peut-être fait en rendant le système automatisé le plus...