Modélisation et simulation spatio-temporelles de
systèmes dynamiques complexes avec application en épidémiologie
Les Systèmes Multi-Agents (SMA)
Les systèmes multi-agents (SMA) se focalisent davantage sur le rôle des interactions et des modes d’organisation dans la description et la compréhension de la dynamique des systèmes. La description des interactions se fait à un niveau de détail plus fin. Cette méthode permet la gestion et prise en compte de dynamiques nouvelles (émergence) du système à un niveau de détail supérieur à partir d’une modélisation effectuée à un niveau de détail hiérarchiquement inférieur. [46] propose une méthode de résolution de problèmes par émergence à partir d’une analyse réductionniste et une modélisation/simulation de cette réduction pour retrouver le phénomène global. Les applications utilisant les SMA sont diverses et variées et aujourd’hui encore, la définition d’un agent varie suivant le contexte. Cependant, les divers auteurs s’accordent sur les principales caractéristiques de tels systèmes.
Étude de quelques modèles
Les Agents G. Weiss [48] définit de manière générale les agents comme étant des entités autonomes qui peuvent être vues comme percevant leur environnement à l’aide de récepteurs et qui agissent sur l’environnement à l’aide d’effecteurs. Il énumère quatre concepts : — l’autonomie; capacité pour un agent à effectuer une action de manière libre et volontaire afin de satisfaire un besoin et en utilisant ses propres ressources. Il peut s’il le souhaite, communiquer avec les autres entités; — la coopération; établie lorsqu’au sein d’un environnement, un agent communique avec les agents voisins et qu’ils peuvent s’entraider pour la réalisation de leurs besoins; — l’interaction; pont entre le fonctionnement autonome d’un agent et sa collaboration avec les autres agents; quand il y a collaboration, il y a presque toujours à certains moments un état conflictuel et compétitif; — la position ou localisation; l’environnement au sein duquel évolue l’agent définissant ses conditions d’existence, ses actions et ses interactions avec les autres agents. Les éléments majeurs ici sont les interactions et l’environnement. [30] distingue deux catégories d’interaction : les interactions directes dans lesquelles les agents interagissent ou communiquent par échange de messages et les interactions indirectes dans lesquelles les agents interagissent ou communiquent via l’environnement. Notons que ces définitions présentent les SMA comme des ensembles d’entités discrètes et non formalisées. [50] conçoit un agent comme une entité ou processus au sein d’un environnement virtuel ou réel présentant les caractéristiques suivantes : • l’agent est capable d’actions au sein de l’environnement, • chaque agent a des objectifs et ses actions vont dans le sens de satisfaire ses besoins, • un agent possède ses propres ressources, • chaque agent a une connaissance partielle du système, • l’agent peut interagir avec les autres agents appartenant au même environnement, • le contrôle du système est reparti, • l’agent est capable de reproduction, • le comportement de l’agent varie en fonction de ses perceptions et de ses interactions avec les autres agents. Deux types d’agents sont généralement présentés dans la littérature : les agents réactifs et les agents cognitifs. Les agents réactifs Les agents réactifs sont les agents qui ont une représentation abstraite de leur environnement et des agents voisins. Leur comportement est essentiellement perception-action. ils effectuent un va-et-vient entre ce qu’il perçoivent et l’ensemble des opérations qu’ils peuvent réaliser à partir de leur perception. Les agents cognitifs Ces agents sont dotés d’une intelligence et de raisonnement. Ils ont une perception claire et explicite de l’environnement dans lequel ils évoluent (états, caractéristiques, fonctionnement) et sur les autres agents. [51] disent de ces agents qu’ils sont dotés de convictions, d’objectifs et d’intentions, ces dernières ayant pour but de satisfaire leurs besoins. Les modèles multi-agents ou modèles à base d’agents (MBA) s’apparentent être un moyen assez efficace pour représenter une population d’individus hétérogènes dans un environnement. [28] présente un MBA dans lequel les agents représentant les individus, sont situés dans un environnement homogène représenté par une grille. Les MBA permettent de prendre en considération l’environnement spatial comme un milieu où les personnes se déplacent. Le comportement Agent [49] définit le comportement des agents comme un cycle à trois phases : la perception, la délibération et l’action. FIGURE 2.9 – Comportement d’un agent propose une représentation du comportement d’un agent. Il définit une fonction de comportement Behaviora : Σ 7−→ Aa, avec Aa représentant l’ensemble des actions que peut effectuer un agent. A cela s’ajoutent trois autres fonctions : — P erceptiona : Σ 7−→ Pa qui évalue la perception d’un agent à partir d’un état du système, — Deliberationa : Pa × Sa 7−→ Sa évalue le nouvel état interne d’un agent à partir d’une perception, — Actiona : pa × Sa 7−→7−→ Aa produit une action d’un agent suite à une perception.
L’environnement
Un agent évolue au sein d’un environnement. Contrairement à l’agent qui est doté d’une autonomie de comportement, l’environnement lui, peut être dynamique. Suivant les travaux de [53], [49] énumère deux catégories principales d’environnement : — La discrétisation : l’environnement est défini comme un espace borné qui limite les perceptions et actions d’un agent. FIGURE 2.10 – Exemple d’environnements discrets. — La continuité : toute nouvelle perception ou action dépend de l’action de l’agent et de la nature de perception ou action courante. L’agent est à chaque instant considéré comme le point de référence à partir duquel toute perception ou action doit être évaluée.
Étude de quelques modèles
Les interactions
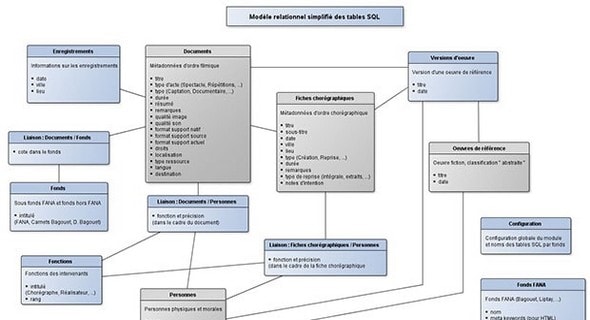
L’interaction est importante pour les agents. Un agent qui communique peut collaborer et coordonner ses actions avec les autres agents, et ensemble, atteindre plus efficacement et mutuellement leurs objectifs. la communication se fait généralement par des messages ou des signaux. FIGURE 2.12 – Illustration du diagramme de classes d’une modélisation à base d’agents d’une population de moustique aedes aegypti . La modélisation par agents présente quelques atouts : la modularité et l’incrémentalité. La modularité suppose qu’il est relativement aisé d’ajouter ou de retirer un ou plusieurs agents du système. L’incrémentalité elle, suppose un affinage aisé du modèle. Le comportement individuel des agents suppose un algorithme. Par conséquent, le système offre plus de précision pour chaque agent qu’avec une description plus globale de toute une population (cas de la modélisation par équations). Malheureusement, cette approche a des inconvénients. Il est difficile d’obtenir un modèle analytique à partir d’une modélisation par agents. Décrire un SMA nécessite de nombreux paramètres et nécessite de grandes puissances de calcul
Les modèles individus-centrés (IBM)
[55] définit les IBM comme des simulations basées sur les interactions locales entre les membres d’une population donnée mais ayant des conséquences globales. Les IBM sont souvent considérés comme des modèles agents, ce sont en réalité des modèles agents particuliers, les individus étant perçus comme des agents. Ces modèles sont un peu comme des systèmes multi-agents (SMA), à la différence que les IBM ont cette particularité que chaque agent représente un individu fonctionnant de manière assez autonome au cours de la simulation. Les IBM sont souvent définis dans l’espace avec des coordonnées géométriques et des fonctions de déplacement qui définissent les mouvements et actions que peuvent effectuer un individu sur une surface de déplacement définie. C’est le cas par exemple avec des systèmes proies-prédateurs. Avec les IBM, les mouvements de chaque individu sont suivis dans le temps, contrairement par exemple à un personnage d’un film animé où l’action est prévue à l’avance ou un avatar dans un jeu de réalité virtuelle dont les actions sont dirigées en temps réel par un participant, très souvent humain [55]. Les travaux de recherche de Reynolds font état de plusieurs simulations individu-centré, que nous pouvons classer ainsi en 2 groupes.
Simulation continue individu-centré
Inspiré par [56] et [57], [58] met au point un algorithme de simulation individu-centré avec évitement d’obstacles. Il considère que la simulation se déroule dans un univers fermé. FIGURE 2.13 – Comportement directionnel . S’inspirant de la nature où aucune des créatures faisant partie d’un groupe n’a pas de connaissance approfondie de l’ensemble du groupe, [55] simule le mouvement d’un troupeau d’oiseaux issu d’un modèle agrégé complexe. Il considère que chaque élément de groupe qu’il appelle « boid » a des connaissances limitées, notamment une connaissance uniquement locale de l’espace par lui occupé et cette connaissance provient d’une vision simulée de sa position actuelle. En clair, il n’existe pas de contrôle centralisé. Le troupeau d’oiseaux dans ce cas prend alors ses décisions de manière totalement repartie afin d’obtenir un mouvement synchronisé. FIGURE 2.14 – Démonstrations du comportement directionnel [59]. [60] a étendu le modèle de Reynolds à d’autres scénarios. Il considère chaque boid comme un ensemble de paramètres connectés utilisés pour simuler un vol en tant que masse, vitesse maximale, accélération maximale, position globale, vitesse actuelle et un système de référence de vue utilisé afin de représenter la perception du boid. Le boid a ici trois sens de déplacement : l’avant, le haut et le bas. Une partie de ces informations est définie à la naissance du boid tandis qu’une autre est mise à jour à chaque image de la simulation. FIGURE 2.15 – Les trois différents types de comportement de direction. Le premier montre la séparation, le boid tend à être plus éloigné des autres voisins. La seconde montre l’alignement, le boid a tendance à s’aligner sur d’autres boids à proximité. Le troisième montre la cohésion, le boid a tendance à rester avec les autres à proximité
Simulation discrète individu-centré
Nous montrons ici qu’un objet complexe peut être généré à partir d’une collection de micro-objets agrégés. L’objet groupé n’est pas semblable à une société bien organisée mais dispose de certaines propriétés essentielles [61]. Aucun des micro-objets n’a d’informations sur la conception de l’objet composé et ne peut donc être capable de le recomposer. Les informations sur la conception de l’objet ne sont non plus localisées dans une région spatio-temporelle particulière : elles sont reparties sur l’étendue de l’aire occupée par l’objet. Pris sous cet angle, les systèmes discrets peuvent alors être perçus comme de systèmes réels ayant une structure définie, bien que cette structure ne soit déterminante et au niveau du système représentant de manière globale l’objet. Il est à noter que le système est donc totalement externe pour les micro-objets bien que dépendant d’eux pour la composition de l’objet global. Le système dépendra donc de règles abstraites ainsi que de leur représentation dans le dynamique processus spatio-temporel
Remerciements |